4.3. Управление в структуре экологического мониторинга
Попытки проникповешйй в сущность современных экологических процессов не могут обойтись без научного управления экологическими системами различного масштаба. Известная схема управления в применении к экологическим системам при анализе ее содержательности переходит в разряд сложнейших. Академик Н. Н. Моисеев употребляет, например, термин "направляемое развитие" экосферы, а не "управляемое развитие", т. к. у человека еще нет полновесного инструмента, чтобы решать полностью задачи экологического управления (хотя есть бомбы, которые в один миг могут уничтожить планетарную экосистему).
Управление в структуре экологического мониторинга
Экологическое управление можно рассматривать как сознательную деятельность по регулированию экосферы в соответствии с практическими целями цивилизации на основе познанных объективных экологических закономерностей естественного или антропогенного характера.
Основные принципы экологического управления можно сформулировать следующим образом:
1) экологическое управление осуществляется на базе целевых функций с учетом предыдущих и текущих показателей экосистемы, модельных прогностических параметров с учетом планирования организационно-технических мероприятии;
2) планирование организационно-технических мероприятии должно производиться с привлечением междуведомственной экспертизы;
3) экологическое управление становится практически осуществимым при ограниченном оптимальном наборе интегральных количественных пли качественных показателей экосистемы;
4) оптимальное экологическое управление требует постоянного накопления и декомпозиции базы данных и базы экологических знаний;
5) полнота экологического управления будет определяться степенью учета обмена веществом, энергией и информацией в экосистеме.
Задачами экологического управления являются:
- восстановление исходного состояния экосистемы;
- перевод экосистемы в другое устойчивое состояние;
- нахождение зон устойчивого состояния экосистемы.
Экологический мониторинг можно считать завершенным как систему при организации соответствующего управления процессами сбора, обработки, храпения и выдачи информации. Целевая функция мониторинга определит технико-экономическую оптимизацию структуры технических средств.
Укрупненную схему экологического мониторинга можно представить в виде структуры, изображенной на рис. 4.13.
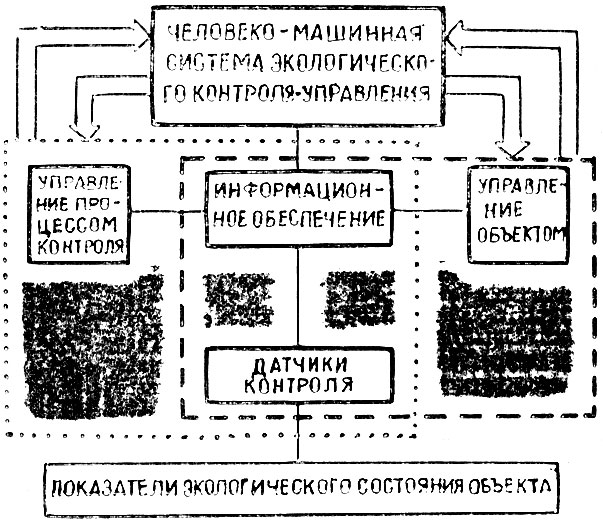
Рис. 4.13. Схема экологического мониторинга
При всем этом необходимо учитывать, что в петом экологическая мониторинговая система преследует одновременно (но в разном соотношении) две цели: познания и управления, хотя зачастую первая пусть ставится с расчетом на переход ко второй цели. В первом варианте данные контроля служат базой получения новых знании, а во втором - основанием к планированию управления объектом контроля. Чем меньше известно об объекте, тем более "интеллектуальным" (изменяющим свой режим работы по отношению к доопытной и текущей информации) должен быть датчик с целью извтечения максим л ли ной информации об объекте контроля и управления.
Переход от диагностических задач к прогностическим и далее к управляющим решениям требует высокого уровня автоматизации многочисленных процессов в мониторинговых комплексах: управление носителем средств контроля (оптимизация таких времякоординатных параметров, как, например, скорость, высота п маршрут полета аэропоептеля), управление режимом работы датчиков, реконструкция банка данных и байка знаний, прогностическая обработка данных и закономерностей, ретрансляция ипформацпн по пользователям. Это предполагает наличие и создание новых пакетов проблемно-орпептпроваппых подпрограмм и единой унитарной управля ющей программы (супервизора).
Экономическая эффективность выбора оптимальной структурно-функциональной организации технических средств мониторинга обеспечивается не только технико-экономическими показателями датчиков контролируемых параметров, но и в той же степени объемом, скоростью и частотой сбора и обработки информации, уровнем ее практического использования потребителями. Уже нельзя удовлетворяться соотношением времени на отбор проб, доставку их в лабораторию и подготовку к измерениям (до 90%) ко времени на проведение измерений и обработку их результатов (около 10%). Учитывая, что использован не аэросредств повышает на несколько порядков оперативность контроля, применение микропроцессоров дает возможность в значительной степени упростить аппаратные средства и ввести в программы ряд таких функций, как линеаризация, масштабирование, сравнение с эталонами, сложные вычислительные операции. Рационализация получе имя исходной информации позволит выявить оптимальный объем данных с требуемым качеством (достоверность, пол пота, возможность оценки экстремальных ситуации и др.).
Представленная на рис. 4.14 структурная схема адаптивной компьютерной контрольно-измерительной подсистемы содержит блок датчиков контроля параметров экологического объекта 1, устройство адаптивной выборки 2, блок памяти 3, коммутатор 4, аналого-цифровой преобразователь 5, пульт управления 6, блок нормализации 7, блок микропроцессоров 8, цифро-аналоговый преобразователь 9, устройство отображения первичной информации 10.
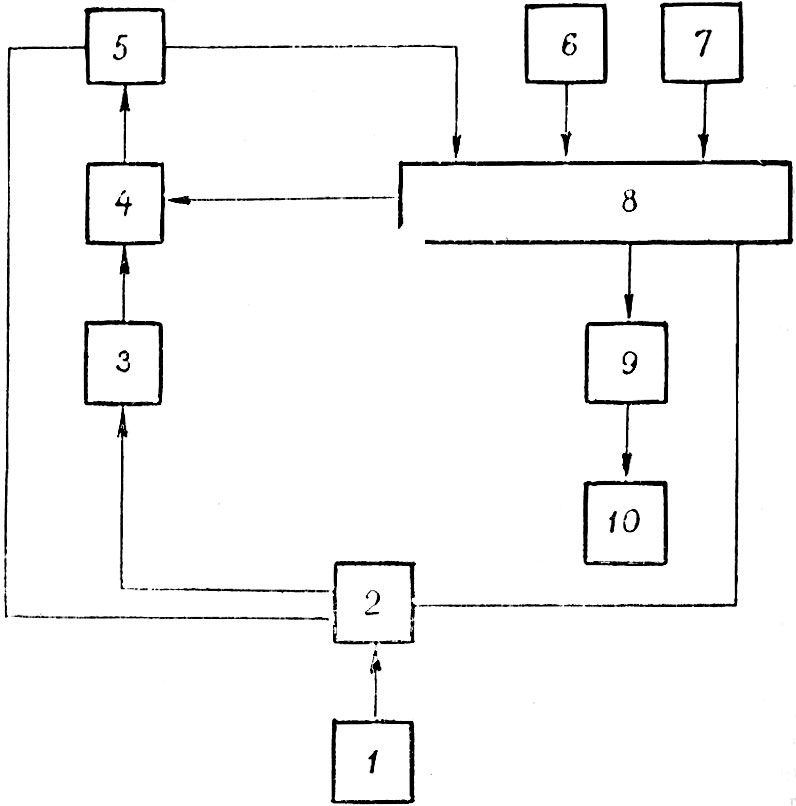
Рис. 4.14. Структурная схема адаптивной компьютерной контрольно-измерителной подсистемы
Сигналы с датчиков поступают на входы устройства адаптивной выборки, время дискретизации которого задается микропроцессором и определяется из априори известной и текущей информации о контролируемом объекте. Подсистема может работать как в режиме с накоплением информации (сигналы с выходов датчиков подаются через блок памяти, коммутатор, аналого-цифровой преобразователь в блок микропроцессоров), так и в оперативном режиме реального времени (сигналы с выходов датчиков подаются на устроейтво отображения первичной информации путем предварительной микропроцессорной обработки и аналого-цифрового аналогового преобразования). Режим работы коммутатора задается автоматически микропроцессорами пли полуавтоматически оператором с пульта управления. Запись служебной информации (координаты и время снятия первичной информации, скорость и высота полета и др.) производится с выхода блока нормализации. Блок микропроцессоров производит по заданным программам математическую обработку вводимых массивов первичных данных с получением характеристик и показателей в виде числовых таблиц, графиков, электрических сигналов телеметрии.
Данная подсистема уменьшает информационную избыточность данных, поступающих с датчиков. Это позволяет устранять затраты на переработку избыточных данных, занимающих в ряде случаев до 90% от общего количества данных. В свою очередь, уменьшится загрузка подсистемы, повышается быстродействие получения выходных сведений, сокращается объем аппаратных средств.
Процесс дискретизации первичной информации устройством адаптивной выборки является сложным у широкого перечня контролируемых экологических параметров, для которых значения времени дискретности различны.
Наиболее предпочтительным методом сопряжения данных в этом случае является приведение времени дискретности съема информации с датчиков к кратным значениям. Это позволяет оптимизировать соотношение между объемом данных, временем обработки информации и тождественностью получаемой информации реальным экологическим процессом.
Обозначим через N общее число датчиков (например, число одновременно контролируемых параметров), Р - максимальное число дискретных выборок для одного из параметров в течение всего времени съема Т информации. Тогда максимальное число дискрет для всех одновременно контролируемых параметров будет равно Ммакс=NP. В случае ограниченности общего числа выборок М и числа одновременно работающих каналов К съема информации требуется оптимально распределить по каналам соотношение кратностей дискретизации сигналов датчиков:

где Δ1=T/P; kN=1, 2, 3, ..., N. При этом время дискретизации может быть разным у всех каналов (k2≠k3≠ ... ≠ kN) или у части каналов одинаковым, а у другой части - разным.
Поясним сказанное на примере системы с N=4 и Р=13 с учетом критериев оптимальности М и К.
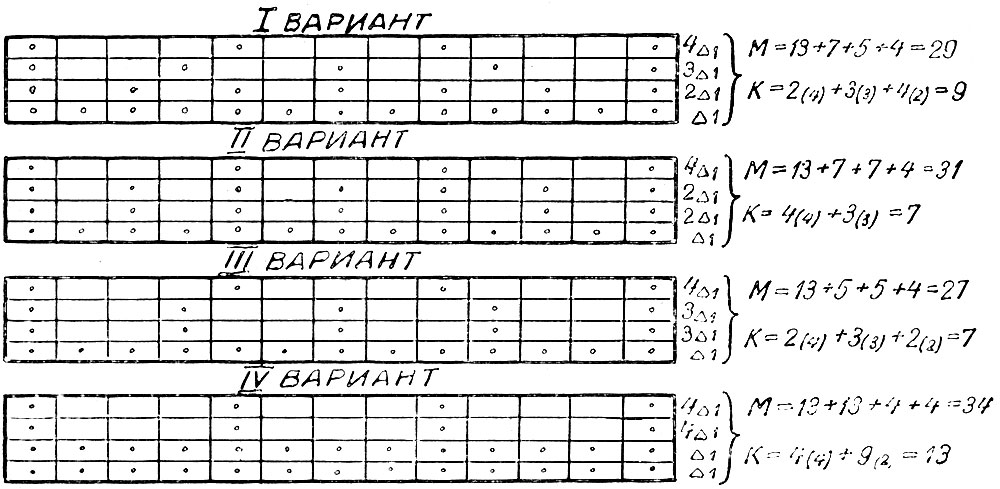
Как видно из приведенных расчетов (а абсолютные цифры значений М и К на практике на несколько порядков больше), распределение по каналам кратностей дискретизации приводит к заметным отличиям значений М и К. Выбор оптимального варианта кратностей, кроме критериев Мминмакс и Кминмакс, требует дополнительно спектральных, корреляционных и других уточнений, которые могут быть сделаны, например, на этапе математического моделирования, постановки задач контроля и управления.
Вопросом, органически связанным, (в смысле эффективного использования главных преимуществ дистанционных измерений высокой производительности и оперативности) с процессом оптимизации получения данных контроля и управления, является выбор маршрута полета и его оптимизация.
Рассмотрим два возможных алгоритма полета для снятия карты поверхностного распределения минерализации водоема.
Первый алгоритм: полеты совершаются по изогалннам. На рис. 4.15 сплошной линией обозначен маршрут полета, а пунктирной - линии нзогалин.
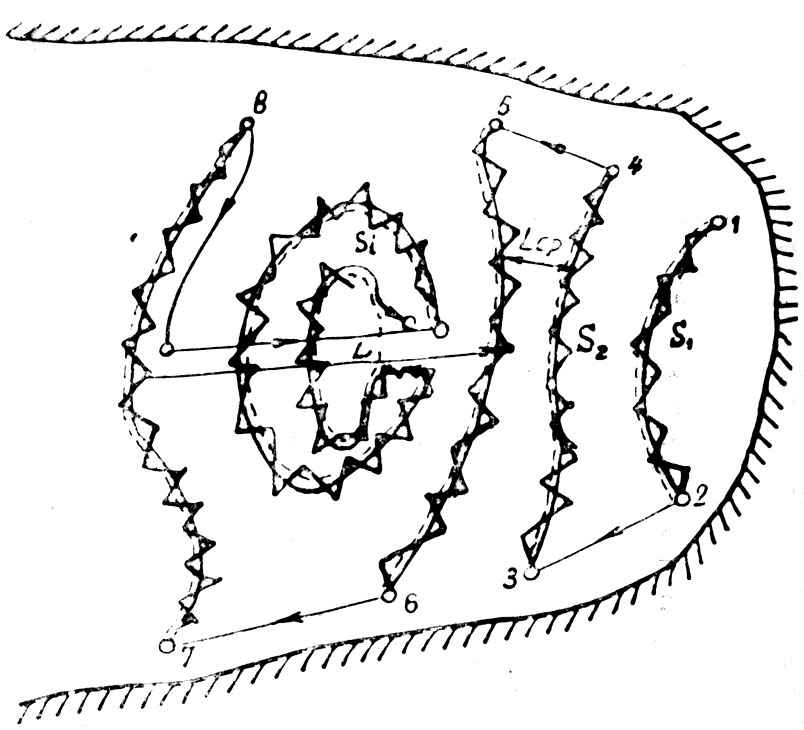
Рис. 4.15. Алгоритм полета по изолиниям экологического параметра
Полет осуществляется из начальной точки 1 по первой изогалине S1. При этом происходит непрерывная запись пространственных координат и времени. Долетев до точки 2, изменяем курс полета в направлении точки 3. Длина пути 2-3 будет определяться заданной дискретностью ΔS съема карты нзогалин. Полет по маршруту 3-4-5-6 будет аналогичен предыдущему. При этом запись значений солености осуществляется в точках 1, 3, 5, 7, ... и на маршрутах 2-3, 4-5, 6-7,...
Наличие расстояний L, резко отличных (много больше) от среднего расстояния Lcp между изогалинами, может означать существование замкнутых нзогалин Si. В этом случае целесообразно совершить продольный контрольный пролет по маршруту расстояния L. Наличие экстремумов в значениях солености по этому маршруту укажет на существование замкнутых нзогалин, которые затем нужно облетать.
В результате получаем карту распределения соленостей заданной акватории.
Данный алгоритм т?ебует постоянного определения и записи в память пространственных координат и времени полета, а также непрерывной корректировки маршрута полета (по отклонению от значения изогалины), что снижает производительность измерений.
Рассмотренный алгоритм, очевидно, наиболее целесообразен для оконтуривапия влияния стоков рек на гидрорежим морской или озерной акватории, изучения карт соленостей водоемов с плохо известным априори приближенным распределением изогалин и других задач.
Второй алгоритм: по прямоугольникам. Обозначения линий на рис. 4.16 соответствуют предыдущей иллюстрации.
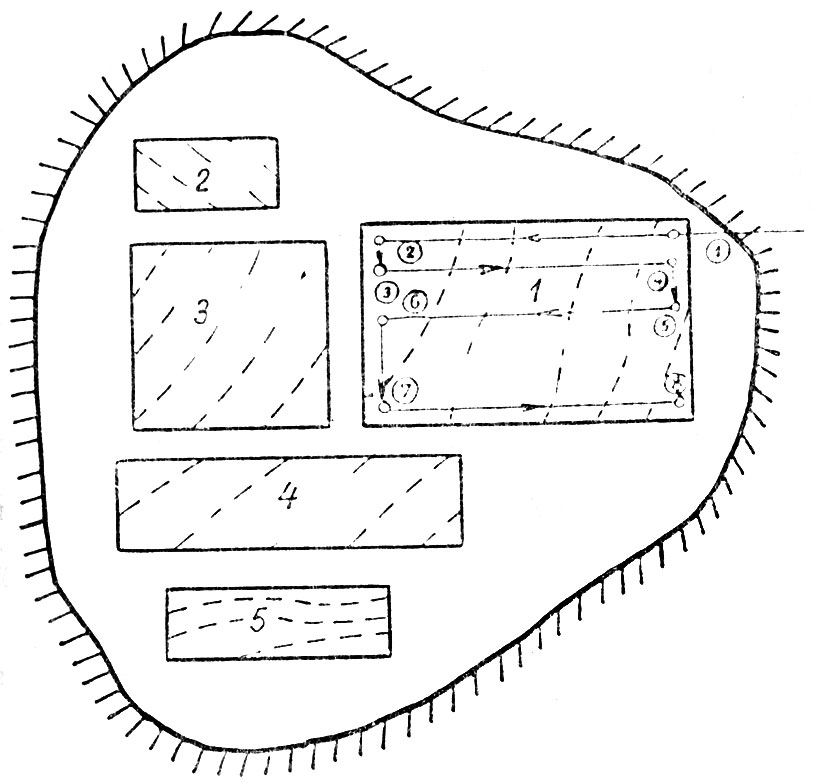
Рис. 4.16. Алгоритм полетов по прямоугольникам
Априори разбиваем акваторию на прямоугольные районы, основываясь на знании усредненных характеристик изменений изогалин (например, по изопараллельности линий солености в данном районе).
При полете от точки 1 до точки 2, задавшись высотой полета, непрерывно фиксируем в память координаты, время и значения солености.
Из точки 2 летим в точку 3, находящуюся от точки 1 на расстоянии Δ; из точки 3 - в точку 4 и т. д.
В результате получаем возможность отметить произвольное число изогалин, соединив точки одинаковой солености на прямых линиях 1-2, 4-3, 6-5 и т. д.
Однако остался невыясненным вопрос о численном значении величины А, которое и будет определять погрешность интерполяции получения изогалин между соответствующими точками линий 1-2, 4-3, 6-5 и т. д.
Используя, в частности, линейную интерполяцию, можно получить следующие результаты. Допустимый шаг Δ равномерной дискретизации при заданной погрешности γ определения координат точек изогалины на участке X будет равен
где у"макс - модуль максимального значения второй производной уравнения кривой изогалины у(х).
Если мы приближенно знаем, как изменяется значение солености на единицу длины, то можно размерность γ в единицах длины перевести в размерность единиц солености. Тогда, получив при заданном шаге А величину γ
и переведя γ в минерализацию, можно найти погрешность получения изогалин.
Изменение шага Δ позволит тем самым регулировать погрешность получения тех или иных линий одинаковой солености, значение шага Δ будет определять также и длину пути полетов (L - длина пути от точки 1 до точки 2).
Рассмотрим конкретные примеры.
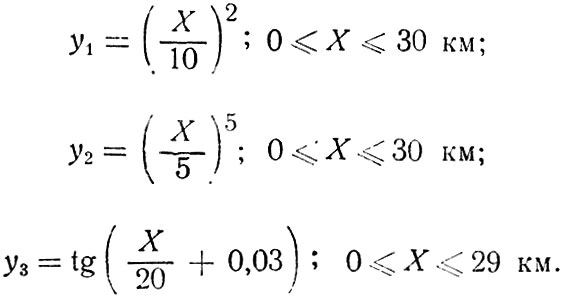
Выберем три закона изменений изогалин по площади, которые изображены на рис. 4.17:
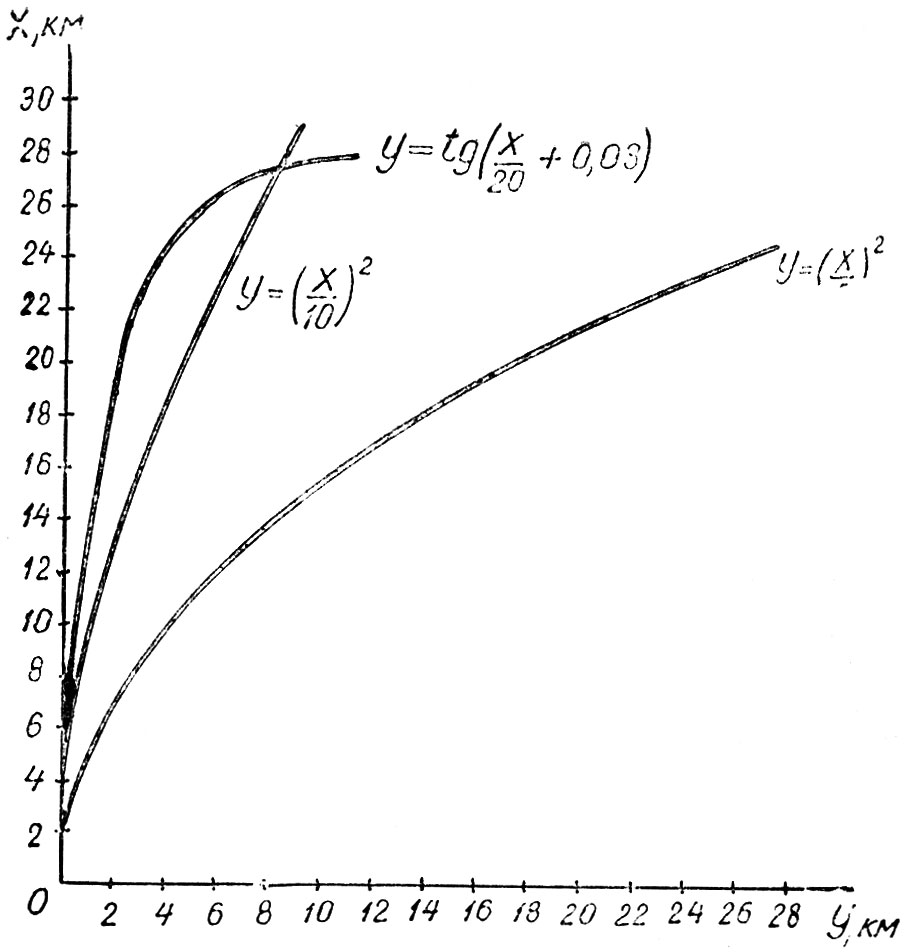
Рис. 4.17. Формы изогалин по площади водоема
Дискретизацию проводим по оси Х(ΔХ), погрешность определяем по оси Y (γY). Допусти также, что минерализация в среднем меняется через каждые 20 км на 1 г/кг.
Дифференцируя y1, y2 и y3, получаем:
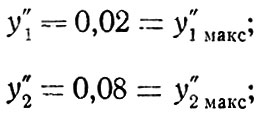
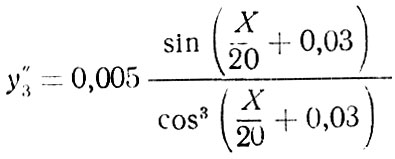
Тогда в результате дифференцирования имеем:
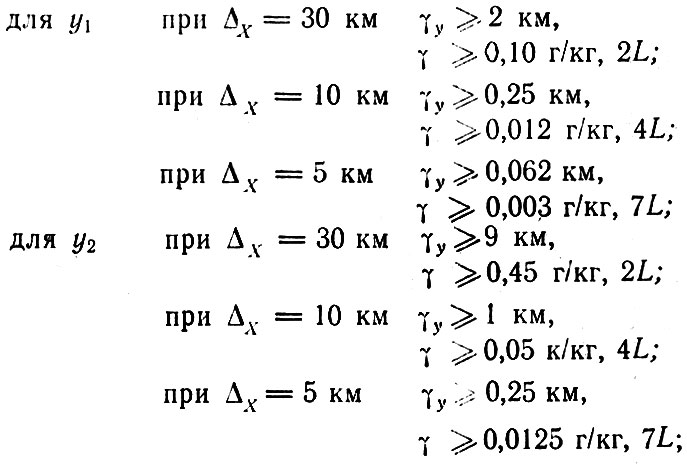
Ввиду резкого различия вторых производных на разных участках требуется разбивка на подучастки:
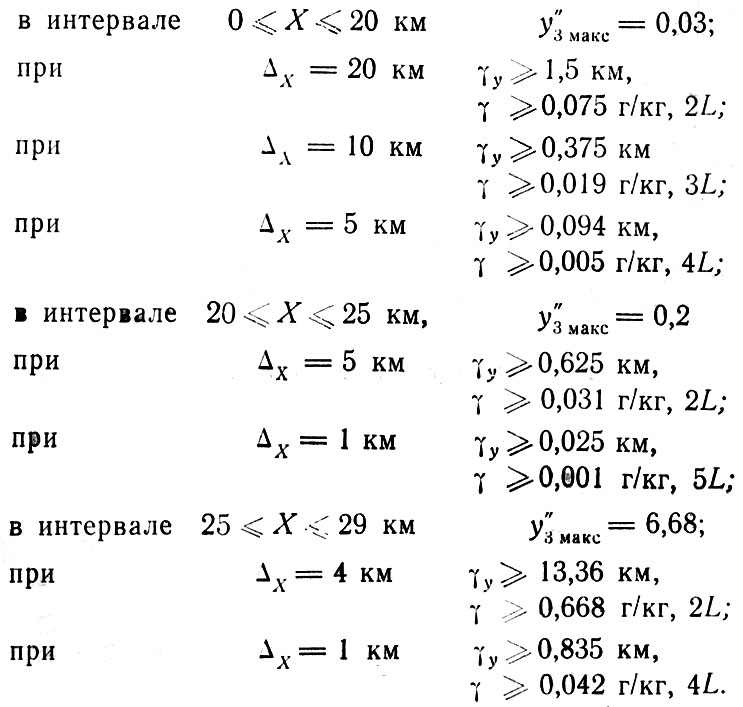
ПРИВЕДЕННЫЕ РАСЧЕТЫ ПОКАЗЫВАЮТ, что выбор шага дискретизации полета существенно влияет на точность составления карты изогалин акваторий, полную длину пути полета (время снятия карты солености акваторий), объем машинной памяти.
Для наглядности приведем карту распределения солености Азовского моря. На рис. 4.18 изображены усредненные изогалины за май (сплошные линии), август (штриховые линии) и сентябрь (штрихпунктирные линии) контрольного года.
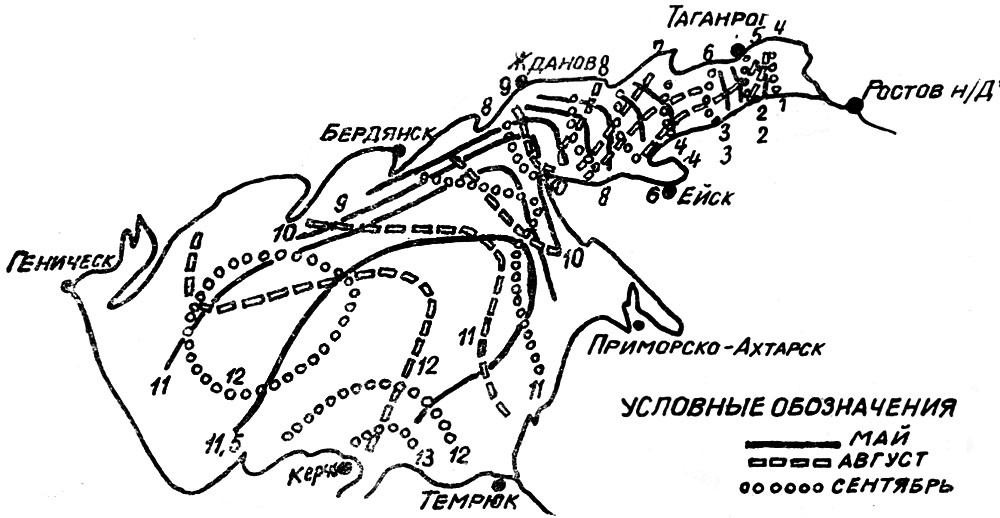
Рис. 4.18. Карта распределения солености Азовского моря
Вопросы для самопроверки
1. Каково назначение и содержание экологического мониторинга?
2. Классификация средств и показателей экологического наблюдения.
3. Сущность контактных методов контроля.
4. Свойства неконтактных методов контроля.
5. Принципы функционирования средств неконтактного контроля.
6. Разновидности активного и пассивного контроля.
7. Физическая природа среды (вещества).
8. Волновой спектр электромагнитного поля.
9. Типы, характеристика и свойства электромагнитных волн и процессов.
10. Волновое уравнение электромагнитного поля.
11. Формальное описание параметров антенны.
12. Основные квантовые эффекты взаимодействия магнитного поля с веществом.
13. Каковы формы и законы теплового электромагнитного излучения?
14. Что называется релаксацией?
15. Описание алгоритмов сбора и обработки информации об экологических параметрах.
16. Особенности неконтактного контроля экологических параметров атмосферы, литосферы, гидросферы, биосферы, техносферы.
17. Оценка параметров водной и других сред.
18. Аэроносители средств контроля.
19. Особенности экологического моделирования, прогнозирования и управления.
20. Условия экологического равновесия.
21. Типы математических моделей и особенности их построения.
22. Привести примеры уравнений математической модели поведения экологического объекта.
23. Постановка задачи экологического "черного ящика".
24. Алгоритм построения имитационной модели системы
25. Основные принципы и задачи экологического управления.
26. Структурная схема экологического мониторинга.
27. Проблемы оптимизации экологической информации.
28. Описание базовых алгоритмов мониторинга.
29. Цели и задачи непрерывной экологической подготовки.
30. Экологические перспективы развития.
Элементы международной стратегии действия в области образования и подготовке кадров по вопросам окружающей среды на 1990-е годы
(Международный Конгресс ЮНЕСКО-ЮНЕП по образованию и подготовке кадров в области окружающей среды. - Москва, СССР, 17-21 августа 1987 г.)
Среди элементов, способствующих конкретному развитии образования в области окружающей среды, самым важным, видимо, является его подход, ориентирующийся на разрешение конкретных проблем, связанных с окружающей человека средой. Из этого вытекает другой важнейший аспект образования, а именно: междисциплинарный подход к вопросам окружающей среды, учитывающий ее сложность и многообразие влияющих на нее факторов.
Меры, позволяющие обеспечить расширение и повышение качества подготовки специалистов по различным дисциплинам, связанным с окружающей средой, прежде всею означает постоянное совершенствование действующих программ высшего образования и создание новых программ на всех уровнях обучения.
Подготовка специалистов по различным научным и техническим дисциплинам в области окружающей среды необходима для обеспечения в рамках стратегии устойчивою развития более рационального и, следовательно, более гармоничного взаимодействия между социальными системами и окружающей человека средой.
При использовании материалов сайта активная ссылка обязательна:
http://ecologylib.ru/ 'Зелёная планета - экология и охрана природы'