4.1 Средства экологического контроля
Задача получения достоверной, полной и оперативной информации экологического состояния является важнейшей, но и многотрудной. Вопросы повышения производительности и оперативности измерений, регулярности контроля, масштабности охвата одновременным контролем, автоматизации и оптимизации технических средств и самого процесса контроля становятся определяющими в оценке эффективности того или иного мониторинга в целом.
Средства экологического контроля можно условно разделить на контактные и неконтактные, а контролируемые показатели на две категории:
- функциональные (продуктивность, скорость изменения процессов, круговорот веществ и др.);
- структурные (абсолютные или относительные значения физических, химических или биологических параметров и др.
Охарактеризуем контактные методы.
Метод газовой хроматографии. Основан на разделении летучих соединении вещества при заданном температурном режиме. Площадь каждого пика хроматограммы пропорциональна концентрации соответствующего компонента.
Полярографический метод. Данный метод является электрохимическим, в основе его лежит зависимость между характером поляризации рабочего электрода и количественным и качественным составом исследуемого вещества, содержащего электровосстанавливающиеся или электроокисляющиеся компоненты.
Кондуктометрический метод. Основан на зависимости электропроводности и диэлектрической проницаемости вещества от концентрации и природы его компонент.
Кулонометрический метод. Базируется на измерении количества электрической энергии, затраченной на осуществление данного электрохимического процесса в данной пробе.
Потенциометрический метод. Метод основан на изменении потенциала электрода в зависимости от физико-химических процессов, протекающих в веществе.
Ионометрический метод. Основан на реакции ионоселек-тивных электродов, обратимых к большому числу катионов и анионов.
Колориметрический метод. Базируется на измерении избирательного ослабления светового потока, прошедшего пробу исследуемой среды.
Рефрактометрический метод. Базируется на измерении избирательного преломления светового потока, падающего на поверхность пробы исследуемой среды.
Люминесцентный метод. Основан на зависимости спектра сигнала, переизлученного пробой контролируемого вещества под воздействием облучающего сигнала.
Термографический метод. Базируется на тепловом расширении жидкостей (ртути или спирта) или изменении с нагреванием электрического сопротивления пли силы термоэлектрического тока.
Метод титрования. Метод основан па характерных реакциях пробы исследуемого раствора с веществом-индикатором. Акустический метод. Основан на изменении параметров акустического поля при контакте с пробой исследуемой среды. Механический метод. Базируется на измерении механических характеристик пробы исследуемого объекта.
Контактные методы дополняются неконтактными, которые основаны на использовании двух свойств зондирующих (электромагнитных, акустических, гравитационных) полей: осу-щесгвлхгъ взаимодействуя с контролируемым объектом и переносить полученную при этом информацию к датчику. Зондирующие поля обладают широким набором информативных признаков и разнообразием эффектов взаимодействия с веществом объекта контроля.
Принципы функционирования средств неконтактного контроля условно делят на пассивные и активные. Пассивный - когда осуществляется прием зондирующего поля, исходящего от самого объекта контроля; активный - когда производится прием отраженных, прошедших или переизлученных зондирующих полей, созданных сторонним источником. Рефлексный метод контроля представляет собой разновидность активного контроля при одновременном совмещении функций передачи и приема зондирующих сигналов. Оба принципа контроля основаны на частотной и пространственно-временной избирательности, чувствительности параметров зондирующих сигналов к тому или иному контролируемому параметру. При реализации пассивных датчиков обходятся только одной основной операцией - приемом сигналов, излучаемых объектом контроля, однако пассивные сигналы обладают малым набором информативных параметров (частота, интенсивность и частичная поляризация, например, электромагнитного радиотеплового сигнала). При осуществлении активного контроля требуется две основные операции - излучение и прием зондирующих сигналов, в то же время активные сигналы обладают широким набором информативных параметров (частота, амплитуда, мощность, фаза, форма, поляризация и ряд других). Характерно, что объект, который слабо отражает зондирующие электромагнитные волны заданной частоты дает на этой же частоте сравнительно сильный радиотепловой (пассивный) сигнал и наоборот. Поэтому существуют не только преимущественные области применения активного и пассивного контроля, но и равновесная область, требующая оптимизации по дополнительным критериям.
Дж. К. Максвелл в 60-70 гг. XIX в. обобщил открытые Фарадеем, Ампером, Био и Саваром, Ленцем и другими физиками законы, развил их и создал математическую теорию электромагнитного поля. Открытие в 1905 г. А. Эйнштейном теории относительности привело к созданию электромагнитного поля как особого вида материи, качественно отличного от вещества.
Классическая (макроскопическая) электродинамика характеризует поле лишь волновыми свойствами, а элементарные частицы - корпускулярными. При этом электромагнитному полю присуща непрерывность его распределения в пространстве и распространение его во времени.
Так как объемная плотность массы электромагнитного поля мала, то в вакууме и при отсутствии сильных гравитационных полей скорость поля постоянна и равна скорости света. В одном и том же объеме может существовать множество электромагнитных волн, вещество и электромагнитное поле могут быть взаимно проницаемыми, занимать один и тот же объем и влиять друг на друга.
Квантовая электродинамика объясняет микроскопические процессы: процесс теплового электромагнитного излучения, фотоэффект, эффект Комптона и другие явления атомарного масштаба. При этом протяженное электромагнитное поле рассматривают как состоящее из независимых друг от друга дискретных частиц - фотонов, обладающих двойственной корпускулярно-волновой природой. Фотоны распространяются со скоростью света в вакууме и целиком поглощаются или излучаются атомами. Фотоны электромагнтиных полей высокой частоты обладают относительно большой дискретно-изменяющейся энергией (например, длине волны 1 мм соответствует энергия кванта 1,25•10-5 эВ, длине волны 760 мм - 3,3 эВ).
Электромагнитную волну можно описать следующим образом:
f=с/λ0,
где f - частота колебаний; λ0 - длина волны в вакууме; с - скорость электромагнитной волны в вакууме и квантовыми параметрами
Q=hf,
где Q - энергия кванта (фотона); h - постоянная Планка.
Распространяющееся от источника поля (антенны) электромагнитное возмущение называют электромагнитной волной, а процесс создания этой волны ускоренно и направленно движущимися зарядами (т. е. переменными во времени источниками) представляет собой излучение волны. Антенны всегда устраиваются так, чтобы токи в антеннах были значительно большими, чем в непосредственной примыкающей к пей окружающей среде (воздухе). Другой вид электромагнитного излучения представляет собой излучение самого объекта, как вещества в состоянии термодинамического равновесия, за счет преобразования энергии теплового движения атомов, молекул в энергию электромагнитного поля.
Электромагнитная волна вызывает в полупроводящем объекте контроля токи двух видов: ток смещения и ток проводимости. Эти токи, совместно с переменным магнитным полем, являются источником новых электромагнитных волн: отраженных и преломленных. Соотношение между этими токами, а соответственно, и соотношение между величинами отраженных и преломленных волн, зависит от соотношения электропроводящих и диэлектрических параметров объекта контроля, структуры неоднородности объекта (т. к. на границах неоднородностей также образуются новые отраженные и преломленные волны).
Среду (вещество) при ее макроскопическом рассмотрении делят по электрическим и магнитным свойствам на изотропную и анизотропную, линейную и нелинейную, однородную и неоднородную.
Изотропной называют среду, физические свойства которой одинаковы по всем направлениям в каждой ее точке. Анизотропной называют среду, физические свойства которой различны по разным направлениям.
Линейной (нелинейной) называют среду, свойства которой не зависят (зависят) от величины векторов поля.
Однородной назовем среду, параметры которой имеют одно и то же значение во всех ее точках, т. е. не являются функциями координат. Неоднородной называют среду, параметры которой непрерывно меняются от точки к точке и представляют собой некоторые функции пространственных координат.
По магнитным свойствам линейные изотропные среды делят на парамагнетики (намагничивание под действием внешнего поля происходит по направлению этого поля) - μ>1, диамагнетики (намагничивание происходит в обратном направлении) - μ<1. Практически у последних μ≈1.
Например, атмосферный воздух относят к линейным, изотропным, неоднородным средам, воду - к диамагнетикам, а кислород - к парамагнетикам.
Волновой спектр электромагнитного поля можно условно представить следующими составляющими:
- низкочастотные волны (длина волны в вакууме 1011... 104 м);
- радиоволны (10 км... 1 см);
- микроволны (10... 1 мм);
- инфракрасные волны (1000... 0,78 мкм; 0,78... 1,4 мкм - ближняя; 1,4... 3,0 мкм - средняя, 3,0 мкм... 1,0 мм - дальняя зоны), возникают главным образом при колебаниях молекул или групп атомов;
- видимые волны (780... 400 нм), излучаются атомами или молекулами в результате изменения состояний электронов на внешних оболочках; ,
780... 730 пурпурный цвет,
730... 605 красный цвет,
605... 595 оранжевый цвет,
595... 580 желтый цвет,
580... 560 желтовато-зеленый цвет,
560... 500 зеленый цвет,
500... 490 синевато-зеленый цвет,
490... 480 зеленовато-синий цвет,
480... 435 синий цвет,
435... 400 фиолетовый цвет.
- ультрафиолетовые лучи (400... 1 нм), имеют то же происхождение, что и видимые;
- рентгеновские лучи (1000... 1 пм), возникают в результате изменений состояния электронов на внутренних оболочках атома;
- гамма-излучение (1000... 1 фм), излучается возбужденными ядрами атомов и элементарными частицами.
Исходными уравнениями электромагнитного поли являются уравнения Максвелла. Уравнения классическом электродинамики в интегральной форме характеризуют электромагнитный процесс в некотором объеме и позволяют получить суммарный эффект. Для характеристики поля в каждой точке области, где его векторные составляющие непрерывны и дифференцируемы, существуют уравнения Максвелла в дифференциальной форме. Для граничных областей имеют место граничные условия.
Основной особенностью волнового процесса и, в частности, электромагнитной волны, является способность переносить энергию без переноса вещества.
Электромагнитные волны являются поперечными, т. к. векторы электрической Е и магнитной H папряжепностей поля взаимно перпендикулярны и лежат в плоскости, перпендикулярной к вектору скорости распространения волны. Электромагнитная волна называется плоской, если векторы E и H зависят только от времени и одной декартовой координаты (в плоской волне все лучи - направления переноса энергии, параллельны друг другу); сферической - если ее интенсивность зависит только от расстояния до некоторой точки, называемой центром волны. Б зависимости от. соотношения амплитуд и начальных фаз суммируемых монохроматических волн результирующая электромагнитная волна характеризуется тем пли иным видом поляризации. Поляризация определяет закон изменения направления и величины вектора Е (и H) этой волны в данной точке пространства за период колебания. Существуют три вида поляризации монохроматических волн: линейная (направления колебаний векторов Е и H в любой точке пространства остаются неизменными с течением времени, а сами колебания являются возвратно поступательными движениями по прямой линии, перпендикулярной направлению распространения волны), круговая (векторы Е и H в любой точке пространства равномерно вращаются, описывая своими концами окружность за время периода), эллиптическая (векторы Е и Н в любой точке пространства вращаются, описывая своими концами эллипс за время периода). Для немонохроматических процессов кроме поляризованных волн, могут существовать также неполяризованные (векторы Е и H хаотически, случайным образом меняют свое направление в плоскости, перпендикулярной направлению распространения) и частично поляризованные волны (сумма поляризованной и неполяризованпой волн). Различают также виды линейной поляризации: вертикальную (при которой вектор Е лежит в плоскости падения волны, а вектор H перпендикулярен этой плоскости) и горизонтальную (при которой вектор H лежит в плоскости падения волны, а вектор Е перпендикулярен этой плоскости).
При падении электромагнитной волны на поверхность той или иной среды (вернее, при пересечении границы раздела двух сред) происходит отражение и преломление волны. Коэффициент отражения (преломления) представляет собой отношение величин отраженной (преломленной) и падающей волн.
Для вертикально (горизонтально) поляризованной волны коэффициенты отражения соответственно равны:
При вертикальном падении волны относительно поверхности контролируемой среды имеем
где Ф, φ - модуль и фаза соответствующего коэффициента отражения;
ε1(2)=ε1(2)-j60λσ1(2) - комплексная диэлектрическая проницаемость, соответственно, среды падения - отражения (1) и преломления (2);
α - угол между вертикалью и направленнем скорости распространения падающей волны.
Законы Спеллиуса для отражения (преломления) на границе раздела двух сред гласят, что угол падения α1 равен углу отражения α2 (угол между вертикалью к границе и направлением скорости распространения отраженной волны), а отношение углов падения и преломления (угол между вертикалью к границе и направлением скорости распространения преломленной волны) удовлетворяет следующему соотношению:
Рассмотрим теперь энергетические соотношения. Учитывая, что энергия падающей волны (Рпад) равна сумме энергий отраженной волны (Ротр) и преломленной (Рпрел):
Рпад=Ротр+Рпрел
а также аналитическое выражение Р=ЕН=Е2/Zср, получаем

После несложных перестановок находим

или

Необходимо отметить, что напряженность поля отраженной (Еотр) и преломленной (Епрел) волны, а также величина угла преломления (α2) зависят от комплексной диэлектрической проницаемости преломляющей среды.
Для однородной, линейной и изотропной сред ослабление преломленной радиоволны характеризуется тангенсом угла потерь, численно равным отношению токов проводимости и смещения
Амплитуда волны убывает в полупроводящей однородной, изотропной среде по экспоненциальному закону, а фаза меняется линейно.
Заметим, что одновременно с увеличением глубины проникновения при росте длины радиоволны происходит и увеличение коэффициента отражения.
Для однородного, линейного и изотропного объекта контроля при воздействии гармонической радиоволны частотой f справедливы следующие соотношения:

длина волны в веществе объекта (изменение длины волны свидетельствует о частотной дисперсии);

комплексная диэлектрическая проницаемость вещества объекта;

волновое число, или коэффициент распространения в полупроводящем объекте, характеризующий изменение модуля и аргумента комплексной амплитуды напряженности электрического поля при перемещении на единицу длины (k0 - волновое число в вакууме; ω - круговая частота; с - скорость света; υф - фазовая скорость волны);

глубина затухания волны в объекте (длина пути прохождения волны, на котором ее амплитуда уменьшается в е раз);

фазовый коэффициент волны в объекте (длина пути прохождения волны, на котором ее фаза уменьшается в е раз);

мгновенное значение напряженности электрическогв ноля в объекте (Е0 - амплитуда напряженности поля в воздухе);
коэффициент отражения от границы "воздух-объект контроля" при вертикальном зондировании.
Для анализа электромагнитной ситуации в объекте контроля исходной является система уравнений Максвелла. В то же время, путем взаимной комбинации названных уравнений, можно совершить переход к так называемым волновым уравнениям, которые проще решать и которыми проще выявлять физический смысл получаемых решений.
Для однородного, линейного, изотропного объекта (а также без источников сторонних токов и зарядов) волновое уравнение электромагнитного поля в объекте, созданного внешним источником облучения, имеет вид однородного дифференциального обыкновенного уравнения второго порядка

При гармоническом волновом пространственно-временном процессе, например для напряженности электрической составляющей поля

дифференциальное уравнение приобретает вид

Здесь h - путь, проходимый волной в объекте, εа и μа - значения абсолютной диэлектрической и магнитной проницаемости вещества объекта.
Учитывая, что

и переходя от абсолютного значения εа к относительному ε=εа/ε0. получаем
Тогда предыдущее уравнение приобретает следующий вид:

или

Решение этого уравнения для мгновенных значений напряженности имеет вид

По аналогии для неоднородного, линейного, изотропного объекта волновое уравнение имеет вид

Находя приближенные решения, отметим, что для выполнения закономерностей геометрической оптики требуется в i-м слое, сравнимом но размерам с длиной волны λ в объекте, соблюдение следующих условий:

При линейном изменении, т. е. когда ε=ε1+nh, σ=σ1+mh (ε1 и σ1 - значения относительной диэлектрической проницаемости и электропроводности в первом верхнем слое, n и m - линейные коэффициенты), и отсутствии заметной частотной дисперсии решение может выражаться в функциях Бесселя порядка 1/3 или с помощью интеграла Эпри. Для параболических неоднородностей (ε=ε1+nh2, σ=σ1+mh2) - например, в функциях Вебера.
Очевидно, для одного и того же коэффициента отражения может существовать разнообразие сочетаний законов неоднородностей. Для устранения многозначности требуется знание дополнительной информации.
Область поля вне излучателя делят на ближнюю, промежуточную и дальнюю зоны.
Ближнее поле (на расстоянии h<<λ0) не участвует в процессе излучения (т. к. движение энергии ближнего поди имеет симметрично колебательный характер), электрическая и магнитная составляющие поля смещены здесь на 90°, т. е. энергия носит реактивный характер, амплитуда электрической компоненты обратно пропорциональна третьей степени расстояния, а магнитной - второй степени, энергия ближнего поля здесь существенно превышает энергию поля излучения.
Промежуточное поле (на расстоянии, сравнимом с длиной волны в среде распространения - воздухе) является переходным от зоны индукции к зоне излучения. Дальнее поле (на расстоянии h>>λ0) определяет поле излучения в виде бегущих волн, у которых фазы компонент поля совпадают (т. е. соответствующая им энергия является активной), амплитуда компонент обратно пропорциональна первой степени расстояния, энергия поля движется в одном направлении, векторы компонент взаимно перпендикулярны.
В дальней зоне однородной среды без потерь фаза компонент поля представляет собой линейную комбинацию

где ω0 - круговая частота распространения волны;
t - текущее время;
k0=2π/λ0 - волновое число, или коэффициент фазы;
h - расстояние до объекта;
с - скорость распространения электромагнитной волны в среде без потерь (в вакууме);
λ0 - длина волны в среде без потерь (в воздухе).
Связь между электрической Е и магнитной Н напряженностями поля в дальней зоне определяется волновым сопротивлением среды распространения

(для воздуха в нормальных условиях W0=120π Ом).
Напряженность поля Е, распространяющегося от ненаправленной антенны, излучающей мощность Ризл, равна

Для сравнения различных передающих антенн используют понятие сопротивления излучения Rизл. Излучательная способность элементарного электрического вибратора (разомкнутая система) значительно больше, чем элементарной рамки (элементарный магнитный излучатель, замкнутая система) по причине их существенно различных значений сопротивления излучения. Чувствительность приемных электрических антенн также выше, чем магнитных.
Сопротивлением излучения антенны называют коэффициент пропорциональности, связывающий мощность излучения с квадратом действующего значения тока, развиваемого генератором или усилителем в антенне:
Значение тока вдоль реальной антенны изменяется (т. к. синусоидальный закон,, т. е. закон стоячей волны, справедлив только при отсутствии потерь в антенне), поэтому сопротивление излучения относят либо к току на входе (в точках питания) антенны, либо к току в пучности. Сопротивление излучения характеризует степень связи антенны с воздушной средой (окружающим пространством). Такая связь так же необходима, как и связь между генератором и его нагрузкой, - генератор отдает свою мощность в нагрузку, а антенна излучает подводимую к ней мощность в окружающее пространство.
Еще более обобщенным параметром антенны является ее входное сопротивление (оно уже является частотно-зависимым и характеризует еще и полосу пропускания 2ΔωА антенны)

где UА - напряжение на входе антенны;
RАвx и XАвх - активная и реактивная составляющие входного сопротивления;
RАп - сопротивление потерь;

(если антенна, например, эквивалентна последовательному колебательному контуру).
Приемные антенны зачастую характеризуют эффективной (действующей) площадью
где

коэффициент направленного действия;
Е0 - напряженность поля, создаваемая антенной в главном направлении в случае работы ее как передающей.
Важным параметром антенны является ее волновое сопротивление
где LA и СА - погонные (на единицу длины) индуктивность и емкость антенны. Волновое сопротивление коротких симметричных вибраторов определяется приближенно по формуле
где l - длина плеча вибратора;
а - радиус провода вибратора.
Параметром, характеризующим направленные свойства антенны и учитывающим потери в ней, является коэффициент усиления антенны.
Зондирующее электромагнитное поле, исходящее от самого объекта контроля, подчиняется законам квантовой электродинамики и обусловлено тепловым движением заряженных частиц среды (молекул, атомов, ионов). В пределах объема среды излучение, создаваемое хаотическим движением электронов, неполяризованпо и ненаправленно. Граница прохождения излучения селективно изменяет первично генерируемые электромагнитные волны (кванты) как по интенсивности, так и по поляризации. Таким образом, тепловое электромагнитное излучение становится направленным и частично поляризованным.
У зондирующего естественного (теплового) электромагнитного поля имеется ряд характерных особенностей:
- среда, которая слабо отражает зондирующие искусственные сигналы (эффективность активного контроля мала), дает сравнительно сильный радиотепловой сигнал и наоборот;
- тепловое электромагнитное поле излучения абсолютно черною тела описывается законом Планка, для которого характерна прямо пропорциональная зависимость интенсивности излучения от абсолютной температуры объекта, т. е. интенсивность излучения зависит только от температуры тела, спектральное распределение излученной энергии имеет экстремальный характер (причем этот экстремум максимума для тел с температурой от 20 до 5 000 К находится преимущественно is диапазоне волн от 740 им до 2 мм.
Формула Планка для абсолютно черного тела имеет вид

где ВλT - интенсивность теплового излучения
h - постоянная Планка (6,025•10-34 Дж/Гц);
k - постоянная Больцмана (1,38•10-23 Дж/К);
Т - абсолютная температура тела:
с - скорость света в вакууме (3•108 м/с);
f, λ - частота, длина волны излучения.
Для реальных объектов потенциально возможное тепловое излучение не все излучается, а частично отражается внутрь среды и зависит не только от температуры, но и от других физических свойств объекта. В результате регистрируется по мощности принятого излучения не действительная (термодинамическая) температура, а кажущаяся (так называемая яркостная или, по-другому-радиояркостная) температура Тя

где ν - излучательная способность среды;
Ф - модуль соответствующего коэффициента отражения Френеля.
Формула Планка при относительно малых частотах излуче ния (hf<<kT) переходит в формулу Рэлея-Джинса:
а при относительно больших частотах (hf>>kT) - в формулу Вина:

где F - универсальная функция отношения частоты излучения абсолютно черного тела к его температуре.
Формула Рэлея-Джинса позволяет при расчете энергетических характеристик радиотеплолокационных систем контроля пользоваться температурой излучающего абсолютно чер нот тела. Так, спектральная мощность сигнала, принимаемого от абсолютно черной излучающей поверхности, равна
а полная мощность в полосе частот Δf
Касаясь толщины слоя среды, формирующего сигнал осте стенного излучения, отметим (учитывая спектральный характер функции Планка, а также величину коэффициента затухания), что возможности внутреннего (глубинного) контроля бред методом пассивной локации еще более ограничены, чем в методе активного зондирования.
Опишем основные квантовые эффекты взаимодействия электромагнитного поля с веществом.
Поглощением видимых волн называется явление уменьшения энергии волны при ее распространении в веществе, происходящее вследствие преобразования энергии волны во внутреннюю энергию вещества или энергию вторичного излучения, имеющего другой спектральный состав и направление распространения. В результате поглощения света может произойти нагревание вещества, ионизация атомов или молекул, люминесценция, фотохимические реакции и др. Поглощение зависит от частоты волны, химической природы, структуры и состояния вещества объекта контроля, а в некоторых случаях от интенсивности волны, относительной концентрации элементов, составляющих вещество. К одним из явлений поглощения можно отнести фотоэффект (взаимодействие электромагнитного поля с веществом, в результате которого энергия фотонов передается электронам вещества) и люминесценцию. Различают внутренний фотоэффект (электроны остаются в веществе и изменяют свое энергетическое состояние) и внешний фотоэффект (поглощение фотонов сопровождается вылетом электронов за пределы границ данного вещества). На основании закона сохранения энергии и импульса фотона поглощение фотона свободными электронами невозможно, таким образом, фотоэффект осуществляется только па электронах, связанных в молекулах, атомах и ионах, а также на электронах твердых кристаллических тел. Число фотоэлектронов, приходящихся на один падающий фотон, называется квантовым выходом, который зависит от свойств вещества и длины волны падающего излучения, а также угда зондирования и поляризации излучения в случае избирательного фотоэффекта.
Люминесценция (нетепловое излучение), по определению С. И. Вавилова, есть излучение, избыточное над тепловым при данной температуре вещества и имеющее длительность послесвечения, значительно большую периода световых колебаний. Задержка излучения по отношению к возбуждению (послесвечение), связанная с конечным временем нахождения центров свечения в возбужденном состоянии, присуща люминесценции и отличает ее от других видов свечения (например, вследствие рассеяния падающего света). Свечение люминесценции возникает вследствие активного поглощения энергии возбуждающего света, в результате перехода молекул, атомов или ионов на более низкий энергетический уровень. Спектр частот, вызывающий свечение, называется спектром возбуждения. Спектры излучения (свечения) носят различный характер, в том числе и избирательный, и обусловлены структурой и составом вещества, действием на него окружающей среды.
Флюоресценция характеризуется не только спектром излучения, но и энергетическим и квантовым выходами. Энергетический выход есть отношение энергии излучения люминесценции к энергии, поглощенной веществом, без учета отраженной энергии; квантовый выход определяется как отношение числа фотонов, поглощенных веществом, к числу фотонов, излучаемых при люминесценции. Главной причиной применения люминесцентного метода является то, что процессы фотовозбуждения с достаточной степенью точности контролируются. Изменяя длину волны зондирующего сигнала, можно заставить люминесцировать отдельные компоненты вещества.
Основные законы флюоресценции можно сформулировать следующим образом:
- спектр излучения вещества не зависит от длины волны возбуждающего света; спектр флюоресценции определяется исследуемым веществом;
- спектр излучения и его максимум всегда сдвинут по сравнению со спектром поглощения и его максимумом в сторону более длинных волн (закон Стокса-Люммеля);
- спектры излучения и поглощения зеркально симметричны как функции частоты;
- энергетический выход флюоресценции зависит от длины волны возбуждающего света (закон Вавилова), а именно: выход увеличивается пропорционально возрастанию длины возбуждающей волны до некоторого спектрального интервала, в пределах которого он остается постоянным, а после него быстро уменьшается.
Рассеянием светового потока называют процесс, сопровождающийся, прежде всего, изменением направления лучепро-хождения в нелинейных неоднородных или анизотропных средах. Это так называемое несобственное свечение обусловлено вынужденными колебаниями электронов в молекулах, атомах или ионах объекта под воздействием светового потока. Рассеяние световых фотонов в мутных средах (аэрозоли, дым, туман, загрязненный воздух, природные воды, кровь и др.) с размерами рассеивающих неоднородностей не более (0,1 ... 0,2)λ, подчиняется рэлеевскому закону (интенсивность рассеянного света обратно пропорциональна λ в четвертой степени). При увеличении размеров неоднородностей степень показателя уменьшается (сложным образом меняется и диаграмма направленности - так называемая угловая индикатриса рассеивания), т. е. зависимость интенсивности рассеянного света от длины зондирующей волны становится более слабой (это явление остронаправленности индикатрисы рассеяния называют эффектом Ми). Общий коэффициент затухания складывается из поглощения и рассеивания.
Одна из форм рассеивания - комбинационное рассеивание, состоящее в том, что в спектре света, рассеянного каким-либо жидким или твердым веществом, наблюдаются наряду с частотами источника облучения также смешанные частоты (стоксовые - с меньшей частотой, антистоксовые - с относительно большей частотой). Стоксовая частота образуется при переходе молекулы вещества в более высокое колебательное энергетическое состояние, антистоксовая - в более низкое.
Другая форма рассеивания - эффект Комптона, заключающийся в изменении частоты рассеянного фотона и отличающийся от фотоэффекта тем, что зондирующий фотон передает частицам вещества свою энергию не полностью. Частным случаем эффекта Комптона являются рассеяние рентгеновских лучей на электронных оболочках атомов и рассеяние гамма-лучей на атомных ядрах. Изменение длины волны зависит от угла рассеивания фотонов (максимально при угле 180°, равно нулю при угле 0° относительно направления зондирования).
Зондирующие электромагнитные поля производят механическое давление (называемое радиационным или давлением излучения) при падении их на поверхность вещества. Волновая классическая теория объясняет это явление возникновением механических сил, действующих на электроны, находящиеся на поверхности вещества, со стороны электрической и магнитной компонент поля. Электрическое поле вызывает колебания зарядов в поверхностном слое вещества, а магнитное поле действует па эти заряды с лоренцовой силой, направление которой совпадает с направлением вектора Пойтинга электромагнитной волны. Квантовая теория характеризует давление излучения как результат передачи фотонами своего импульса атомам или молекулам на поверхности вещества. При своем поглощении фотон отдает импульс hf/c, при отражении (упругом рассеянии) - 2hf/c. В свете одного и другого объяснения радиационное давление Р равно

где W - энергия электромагнитной волны, падающей нормально на единицу площади за единицу времени;
с - скорость света;
Ф - модуль коэффициента отражения вещества при нормальном зондировании;
N - число зондируемых фотонов (N=W/hf);
h - постоянная Планка;
f - частота зондирующего облучения.
Акустическими (упругими) волнами называются распространяющиеся в упругой среде механические возбуждения. Акустические поля бывают продольные, поперечные и поверхностные. При продольных волнах частицы среды находятся в состоянии возвратно-поступательного движения, направление которого параллельно скорости распространения упругой волны; продольные волны связаны с объемной деформацией среды, поэтому они могут распространяться в твердых, жидких и газообразных средах. Поперечные акустические волны характеризуются колебанием частиц среды в плоскости, перпендикулярной скорости распространения волны, и присуши лишь твердым средам распространения, которые обладают упругостью формы. Поверхностные акустические волны образуются на свободной поверхности жидкости или на поверхностях раздела несмешивающихся жидкостей. В этом случае частицы жидкости одновременно совершают продольные и поперечные колебания, описывая эллиптические и более сложные траектории. Особые свойства поверхностных волн объясняются тем, что в их образовании и распространении определяющую роль играют силы тяжести (гравитации) и поверхностного натяжения.
Первые количественные измерения в области акустических колебаний проводились при определении скорости распространения волны (Марсенн измерил скорость звуковых колебании в воздухе в 1636 г., Колладон и Штурм измерили скорость звука в воде в 1826 г.). Гельмгольц, Рэлей и Лебедев на основе работ Эйлера, Бернулли, Фурье и Пуассона в середине XIX в. создали теорию акустического поля.
Уровень акустических исследований резко возрос после установления некоторых взаимодействий акустических и электромагнитных полей и особенно в связи с решением ряда прикладных задач в области радиотехники и электроники (например, разработка электроакустических преобразователей, радиоакустических взаимодействий в средах и др.).
Частотный спектр акустических волн можно представить следующим образом:
- инфразвук (менее 20 Гц);
- слышимый звук (20 Гц... 20 кГц);
- низкий ультразвук (20... 100 кГц);
- средний ультразвук (100 кГц... 10 МГц);
- высокий ультразвук (10 МГц... 1 ГГц);
- гиперзвук (1 ГГц... 10 ТГц).
Частотный спектр акустических волн
По форме волновые поверхности (поверхность, все точки которой находятся в одинаковой фазе) бывают плоские (создаются плоским колеблющимся излучателем):

цилиндрические (создаются цилиндрическим излучателем, меняющим свой радиус):

сферические (создаются сферическим излучателем, меняющим свой объем):

где i - мгновенное значение амплитуды;
А - максимальная амплитуда волны;
t - время распространения волны;
r - расстояние от излучателя;
R - расстояние от оси излучателя;
k - волновое число;
с - скорость звуковых колебаний и другие сложные волны.
Практически на больших расстояниях от излучателя сферические и цилиндрические волны переходят по форме в плоские волны.
Амплитуды колеблющихся частиц в бегущей плоской волне пропорциональны √I (где I - интенсивность акустических волн); при фиксированном значении интенсивности упругости волн амплитуда звукового давления и амплитуда колебательной скорости частиц не зависят от частоты колебаний со; амплитуда смещений обратно пропорциональна частоте колебаний; амплитуда ускорений прямо пропорциональна частоте колебаний. Здесь интенсивность представляет собой среднюю по времени энергию, переносимую упругой волной через единичную площадь в единицу времени. Для плоской гармонической бегущей волны имеем
где Р - амплитуда звукового давления;
υ - амплитуда колебательной скорости частиц объекта, колеблющихся при прохождении в ней акустической волны;
ρ - плотность среды распространения волны;
с - скорость распространения волны.
Величина Z=ρc=P/υ имеет определение удельного акустического сопротивления среды распространения волн (в случае комплексного характера этой величины она носит название удельного акустического импеданса). Выражение υ= P/Z является аналогом закона Ома (υ - аналог тока, Р - напряжения, Z - сопротивления). Звуковое давление определяют как переменную часть давления, возникающего в среде при прохождении акустической волны: образующиеся в среде сгущения и разрежения создают добавочные (по отношению к нормальному давлению в среде) изменения давления. Под скоростью распространения акустических волн понимается скорость перемещения упругой волны в среде при условии, что форма профиля волны остается неизменной. Если форма профиля изменяется, то среду распространения относят к диспергирующим нелинейным средам (частотная дисперсия - когда закономерности изменения формы профиля связаны с изменением частоты колебаний; амплитудная дисперсия - с амплитудой колебаний).
Акустически линейной называют среду, скорость распространения волны в которой не зависит от ее интенсивности, изотропной - скорость одинакова во всех направлениях, однородной - скорость не является функцией координат.
Давление звукового излучения Р3 представляет собой избыточное давление на препятствие (объект контроля), помещенное в акустическое поле. При нормальном падении акустического пучка ограниченного сечения на поверхность раздела двух сред эта поверхность испытывает давление

где Э1 и Э2 - средние по времени значения плотности кинетической энергии падающей волны в первой среде и прошедшей волны во второй среде;
Фр - коэффициент отражения волны по давлению.
Давление звукового излучения Р3 является величиной второго порядка малости по сравнению со звуковым давлением Р.
При попадании на границу раздела сред с различными удельными акустическими пмпедансами часть энергии падающей волны отражается, а другая, преломляясь, поглощается. Все три волны (векторы их скоростей) лежат в одной плоскости с нормалью к границе раздела; угол падения α1 равен углу отражения; соотношения углов падения и преломления α2 удовлетворяют уравнению (закон Снеллиуса)
где с1 и с2 - скорости распространения акустических волн, соответственно, в среде распространения падающей и преломленной волн.
На границе раздела двух сред с различными пмпедансами (Z1 и Z2) выполняются два граничных условия: нормальные компоненты колебательных скоростей частиц сред по обе стороны границы равны; это же условие выполняется и для звуковых давлений; причем со стороны первой среды учитывается вклад как падающей, так и отраженной воли, со стороны второй среды - прошедшей волны. При нормальном падении на границу раздела условие непрерывности звукового давления выражается уравнением
P+P1=P2,
где Р, P1 и Р2 - звуковые давления, соответственно в падающей, отраженной и преломленной волнах.
Для колебательных скоростей условие непрерывности имеет вид
υ+υ1=υ2
Учитывая, что υ=P/Z; υ1=P1/Z1; υ2=P2/Z2, получаем
Тогда коэффициент отражения по давлению равен
Так как Р1=Z1υ1, то

где Фυ - коэффициент отражения по колебательной скорости.
Рассмотрим ряд соотношении между Z1 и Z2:
- при Z2=∞ падающая волна полностью отражается, т. к. Фр=1; Фυ=-1, то P1=P; υ1=-υ. В этом случае амплитуда давления на границе увеличивается в 2 раза, а колебательная скорость падает до нуля, т. е. Р2=2Р; υ2=0 (волна давлений от жесткой границы отражается в фазе, а волна колебательной скорости - в противофазе);
- при Z2=0:Фp=-l; Фυ=1; P1=-Р; υ1=-υ. В этом случае волна давлений отражается в противофазе, а волна колебательной скорости - в фазе (Р2=0; υ2=2υ);
- при Z2>Z:0<Фр<1 и - 1<Фυ<0, т. е. на границе давление повышается, но не достигает своего максимального значения (Р2<2Р); колебательная скорость понижается (но не становится равной нулю);
- при Z2<Z1 давление на границе понижается (не до нуля), колебательная скорость повышается, но не достигает своего максимального значения (υ2<2υ). Тогда коэффициент пропускания по интенсивности равен

Распространение акустической волны в среде сопровождается поглощением, но может быть и рассеяние волны. Поглощение обусловлено трением и теплопроводностью среды. Рассеянием называется процесс преобразования упругой волны в множество волн при дифракции волны на препятствиях неоднородностях объекта контроля, если препятствия имеют отличные от среды сжимаемость или плотность.
Амплитуда и интенсивность плоской волны убывают при ослаблении в однородной среде по экспоненциальным законам:
где A0 и I0 - значения велодшин в точке r=0;
γ - коэффициент поглощения, равный для продольных волн в жидкостях и газах (γ~ω2) величине

Здесь η и ξ - коэффициенты сдвиговой и объемной вязкости среды; k - коэффициент теплопроводности; ср и cν - удельные теплоемкости среды при постоянном давлении и объеме соответственно. Отклонение квадратичного закона изменения у от частоты вызывается релаксацией - внутренним процессом восстановления термодинамического равновесия среды, нарушаемого сжатиями и разряжениями (граничная частота чередования этих разряжений называется частотой релаксации ωр - для воздуха она равна приближенно 500 кГц, воды - 1 ... 10 МГц). Время релаксации τр определяет время, за которое параметр, характеризующий отклонение среды от состояния равновесия, уменьшается в е раз. Релаксация может вызываться конечностью вращательной и колебательной степеней свободы молекул среды, возбуждением электронных уровней молекул и атомов, химической и структурной перестройкой среды. Коэффициент поглощения при релаксации в различных средах имеет вид
где с0 - скорость распространения акустических волн при ωτρ << 1;
с∞ - скорость распространения акустических воли при
ωτρ >> 1; τρ=1/ωρ
Релаксация всегда сопровождается дисперсией скорости распространения акустических колебании.
Неконтактный контроль атмосферы
Великие русские ученые, и первым среди них был М. В. Ломоносов, внесли большой вклад в исследование атмосферы. Д. И. Менделеев, занимаясь изучением газовой оболочки Земли, не раз поднимался на воздушном шаре, чтобы определить состав тропосферы в ее верхних слоях. Служба погоды в России появилась в 1872 г., когда в Главной физической обсерватории (с 1924 г. - Главная геофизическая обсерватория) был выпущен первый бюллетень погоды. Советские ученые занимают передовые позиции как в постановке проблем атмосферы, так и в их решении. В 1930 г. в СССР был запущен первый в мире радиозонд, сконструированный профессором П. А. Молчановым. Профессор Б. П. Мультановский первый в мире разработал метод долгосрочного прогнозирования погодных условий. Наша страна первой открыла новые возможности для ракетного и спутникового изучения атмосферы.

Неконтактный контроль атмосферы
В настоящее время структура метеоисследований состоит из наземных лабораторий, наземных локационных станций, аэролабораторий и радиозондов (до высот 25 ... 40 км), метеоракет (до 150 км), спутниковых орбитальных комплексов (свыше 150 км над Землей). При этом используют акустические и электромагнитные зондирующие поля. Множеством экспериментальных данных подтверждена связь между загрязнениями атмосферы и ее метеорологическими параметрами.
Впервые радиоволны были использованы для анализа состояния ионосферы (по отражению и преломлению волн), затем сантиметровые волны применили для исследования осадков, облаков, турбулентностей атмосферы. Были созданы промышленные радиометеорологические локаторы с радиусом действия около 300 км. Учитывая, что скорость движения воздушных масс у земной поверхности около 1 000 км в сутки, для составления прогноза на сутки надо охватить территорию с радиусом 1000 ... 1500 км. Поэтому глобальные наблюдения над атмосферой могут обеспечить аэроспутниковые системы. В 1965 г. впервые в истории метеорологии была получена карта облачного покрова почти над всей земной поверхностью. Спутниковые системы стали давать информацию о вертикальном профиле давления, влажности, содержании озона и др.
У нас в стране получают свое развитие такие новые направления метеорологии, как изучение гелиогеофизических явлений для обслуживания учреждений по сердечно-сосудистым заболеваниям (1974 г., Латвийская ССР), агрометеорология для созданных агропромышленных объединений.
Дальнейший прогресс в познании атмосферных процессов связан с развитием дистанционных неконтактных методов контроля, позволяющих получить требуемое пространственное и временное разрешение при измерении температуры, давления, влажности, загрязнений, скорости и направления ветра. В связи с этим разрабатываются радиолокационные активные и пассивные, акустические, радиоакустические (двухполевые) методы.
Идея лазерного (лидарного) зондирования атмосферы состоит в следующем. При своем распространении лазерный луч рассеивается молекулами, частицами, неоднородностями воздуха, поглощается, изменяет свою частоту (эффект Доплера, комбинационное рассеивание), форму импульса, состояние поляризации, появляется флюоресценция, что позволяет качественно или количественно судить о тех или иных параметрах воздушной среды (давление, плотность, температура, влажность, концентрация газов, аэрозолей, параметры ветра, турбулентности, стратификации). Преимущества лазеров по монохроматичности, когерентности, поляризованности и возможности изменять спектр излучения создают разнообразие эффектов избирательного контроля отдельных параметров воздушной среды. Использование лидаров с большой частотой повторения импульсов малой длительности позволяет изучать динамику быстропротека:о!цих процессов в локальных объемах и в значительных толщах атмосферы. Важно, как отмечается В. Е. Зуевым, что существенный недостаток лазерного зондирования - ограниченность потолка зондирования атмосферы с Земли влиянием облаков, не является непреодолимым.
Схемы лидарного зондирования делят на моно- (угол падения равен углу отражения и равен нулю, импульсный режим работы) и бистатические (угол между лучом падения и отраженным или прошедшим слой атмосферы лучом изменяется от нескольких градусов до 180°, импульсный или непрерывный режим работы).
При условии молекулярного и аэрозольного рассеяния без учета многократного рассеяния фотонов и нелинейных эффектов справедливо уравнение лазерной локации:

где Рпрλ, Ризлλ - принятая и излученная мощность лазерного импульса на длине волны λ;
R - расстояние до участка рассеяния;
Э - эффективность приемника (фактически это КПД);
А - площадь приемной антенны;
τ - пространственная протяженность импульса;
α180мол, α180аэр - объемные коэффициенты обратного молекулярного и аэрозольного рассеяния по направлению назад (угол рассеяния составляет 180° по отношению к направлению распространения импульса);
П - прозрачность слоя атмосферы до участка рассеяния. Значения величин α180мол, α180аэр и П являются неизвестными.
Приближенное решение этого уравнения связано с использованием априорной информации о значениях двух из трех неизвестных величин (П и α180мол, П и α180аэр) в участке излучения и профиле линии зондирования. Более перспективно однозначное решение данного уравнения с использованием информации:
- о комбинационьом рассеивании, когда в отраженном сигнале появляется кроме основной дополнительная частота (которая для таких основных компонентов атмосферы, как азот и кислород, точно известна) сравнительно слабого (на несколько порядков) сигнала;
- о многочастотпом зондировании, т. к. частотные зависимости молекулярного и аэрозольного рассеяния различны;
- о деполяризации излучения и др.
Без использования дополнительной информации можно при одночастотном зондировании исследовать стратификацию аэрозолей (облака, туманы, дымки, осадки, загрязнения), их пространственно-временную динамику, хотя размеры частиц, концентрация, химический состав аэрозолей при этом не становятся известными.
Контроль лидарами температуры, давления, плотности, влажности, содержания атмосферных газов, параметров ветра основывается на использовании явлений резонансного и комбинационного рассеяния фотонов, эффекта Доплера, изменения формы сигналов поглощения, частотной избирательности при многочастотном зондировании, амплитудной, фазовой и поляризационной флюктуации отраженного поля.
Основными эффектами, ограничивающими дальность и погрешность лазерного контроля атмосферы, являются обратно пропорциональная зависимость амплитуды отраженного сигнала от расстояния до участка контроля (I/R2) и маскирующее действие помех (отношение сигнал/шум). В связи с этим решающее значение приобретают мощность излучения, длительность импульсов, частотная и поляризационная избирательность приема и излучения, чувствительность приемника, избирательность по эффектам взаимодействия зондирующего сигнала и атмосферы (аэрозольное, молекулярное комбинационное рассеяние, поглощение и др.), помехоустойчивость к внешним помехам и внутренним шумам. Зондирование в ультрафиолетовом, видимом и микрометровом диапазонах имеет принципиальные преимущества благодаря максимальным значениям сечений взаимодействия в этом диапазоне электромагнитных волн (порядок значений сечений рассеяния в расчете на одну частицу атмосферы (среды) приведен в табл. 4.1.
В последние 5-10 лет получают свое развитие акустические и радиоакустические методы контроля атмосферы (их основы были заложены советскими учеными в 1940-1960 гг.). Область использования этих методов ограничена сравнительно локальными объемами воздушной среды (приближенно до 1 ... 2 км в радиусе) и допускает их функционирование как в наземных условиях, так и на борту аэроносителей.
| Тип рассеивания | Сечение рассеивания, м2/ср |
|---|---|
| Комбинационное | 10-33 |
| Молекулярное | 10-31 |
| Аэрозольное | 10-31 ... 10-12 |
| Резонансное комбинационное | 10-26 |
| Резонансное | 10-16 и менее |
Одной из причин появления отраженного акустического сигнала являются мелкомасштабные температурные неоднородности, причем коэффициент преломления упругих волн на термических неоднородностях атмосферы на 2-3 порядка больше, чем у электромагнитных волн, что представляет особый интерес для приземного слоя тропосферы. Разработанные наземные акустические системы зондирования атмосферы имеют дальность действия около 1 км и позволяют контролировать температурные изменения, профили скорости ветра, верхнюю границу тумана.
Принцип радиоакустического зондирования приземного слоя атмосферы заключается в доплеровском измерении скорости акустических колебаний электромагнитными волнами, отраженными от периодических неоднородностей диэлектрической проницаемости воздуха, создаваемых акустическими импульсами. Закон изменения диэлектрической проницаемости е подчиняется следующему закону:

где ε0 - диэлектрическая проницаемость воздуха в отсутствие упругих изменений (при отсутствии акустического поля);
Δε - приращение диэлектрической проницаемости воздуха за счет влияния акустического давления;
Ω - частота акустических колебаний;
t - время;
kзв=2π/λзз - волновое число (λзв - длина акустической волны);
r - расстояние.
Значение величины Δε определяется из выражения
где А - численный коэффициент, слабо зависящий от влажности воздуха;
Pзв - звуковое давление;
Т - температура воздуха.
Отражение электромагнитных волн максимально при когерентном сложении сигналов, отраженных от всех точек объема взаимодействия, т. е. при условии (условие Брэгга)
2kэм=kзв - если диаграммы направленности электромагнитного и акустического локаторов совпадают или
2kэм=kзв/cosα - при несовпадении в пространстве диаграмм направленности, учитывая соотношение волнового числа и длины волны
где α - угол между направлением падающей (отраженной) электромагнитной волны и направлением распространения звукового излучения.
Переход от доплеровской частоты электромагнитного сигнала ωд к скорости звука Сзв и далее к комбинации температуры воздуха Т и продольной (вдоль распространения акустической волны) компоненты

скорости ветра осуществляется согласно следующим зависимостям:
При радиоакустическом зондировании высота контроля достигает 300 ... 350 м при среднеквадратичной погрешности определения температуры воздуха 0,2 ... 0,65°С, скорости ветра 0,5 ... 0,75 м/с, направлении изменения указанных величин 5 ... 10° и пространственном разрешении 5 ... 30 м (диапазон акустических и радиоволн рового диапазона - 1000.
С целью повышения точности и достоверности измерений рекомендуется совмещение радиоакустической и акустической систем дистанционного неконтактного контроля приземного слоя атмосферы.
Почвенно-растительным контроль
Аэроисследования геологического строения земной коры, поисков и разведки месторождений полезных ископаемых используют следующие методы дистанционной индикации: фотосъемка, магнитные способы, гамма-съемка, гравитационная разведка, электроразведка, радиолокация. Экологический интерес к этим методам особенно проявляется при проектировании топливно-энергетических комплексов, изысканиях железнодорожных трасс, выборе мест заложения плотин, электростанций, проектировании трубопроводов, каналов, тоннелей и др. Радиофизические методы исследования земных покровов развиваются с 1910 г. (Г. Лови и Г. Леймбах). Широкие исследования в этом направлении ведутся в СССР с 1925 г. (А. А. Петровский, А. Г. Тархов и др.). Первые аэрофизические измерения в Советском Союзе проведены А. А. Логачевым и А. Т. Майбородой в 1936 г. с использованием магнитометров (в частности, в США подобные работы произведены только в 1946 г.). В настоящее время аэрогеофизические методы являются серьезным инструментом проведения достоверных, широкомасштабных научных исследований и народнохозяйственных мероприятий.
Почвенно-растительным контроль
В связи с интенсификацией сельскохозяйственного сектора экономики получают практическое развитие аэрометоды поч-венно-растительного контроля. Для оценки состояния почвы и сельскохозяйственных культур, решения вопросов планирования агрометео- и агротехмероприятий необходимо прогнозировать оптимальные сроки сева, нормы и сроки полива, дозы питания и подкормки, меры борьбы с заморозками, засухой, сорняками, вредителями. При этом важно иметь достоверные, оперативные и широкомасштабные данные о температуре почвы и ее вертикальном профиле (температуре воздуха), влажности почвы по вертикальному разрезу, кислотности, засоленности, гумусности почвы, сведения о состоянии посевов, снежном покрове.
Состояние посевов принято характеризовать следующими параметрами: биометрическими (биомасса, площадь листовой поверхности, высота, густота, площадь покрытия растительностью), повреждениями (полегание, поражение болезнями и вредителями), засоренностью (вид сорняков, количество, степень развития). Существенным экологическим параметром является загрязненность почв пестицидами, тяжелыми металлами, канцерогенами. Им оценивается антропогенное воздействие на посевы.
С 80-х годов ряд государств уже оправдано идет на значительные расходы с целью получения глобальной (космической) информации о своих биолитосферных фондах. В частности, приводятся планируемые расходы на разработку, изготовление и функционирование космической радиометрической микроволновой системы, предназначенной, в основном, для измерения влажности почв с разрешением по пространству 1 км, температуре - 1 К, повторным обзором - каждые 6 суток. Общая стоимость системы составляет 332 млн. долл.: 50 млн. - разработка, 110 млн. - изготовление, 3-4 млн.- полеты, 162 млн. - транспортировка и сборка на околоземной орбите (радиометр имеет волноводную щелевую антенную решетку размером 70X70 м).
Академик, вице-президент АН СССР А. Яншин, член-корреспондент АН СССР, председатель научного совета по проблемам почвоведения и мелиорации почв СССР В. Ковда, касаясь судьбы черноземов, отмечали: "С точки зрения науки поливы должны соответствовать свойствам почв, требованиям погоды и самих растений, уровню и химизму грунтовых вод. Но учесть погоду, почвенную и геологическую пестроту не просто. И обычно это не делается. Лучший способ избежать переполива, - это применение полевых портативных влагомеров. У земледельцев их нет... График зависимости урожая от обеспеченности поля влагой показывает, что по мере увеличения оросительной нормы прирост урожаев постепенно снижается. Рациональное понижение норм поливов позволит оросить большую площадь, кубометр воды даст максимальную отдачу, подъем грунтовых вод и заболачивание будут происходить реже" ("Правда", 31 мая 1984 г.).
Существующие экспериментальные неконтактные радиофизические средства контроля биолитосферных образований основаны на отражательных свойствах почв, растений и деревьев, их излучательной способности, эффектах взаимодействия поверхностных радиоволн с подстилающей средой и др.
В ближнем ИК-спектре отражательно-поглощательные свойства разнообразных почв имеют характерные экстремумы при вариациях влажности, комковатости почв, содержания хлорофилла в растительных объектах, хотя общий ход этих частотных зависимостей имеет приближенно одинаковые закономерности.
Для почвенно-растительного покрова в видимом спектре используют различные оптические характеристики: альбедо - величина, определяемая отношением суммы потоков излучения, отраженного от исследуемой поверхности и вышедшего из ее толщи, к потоку падающего (солнечного или искусственного происхождения) излучения; коэффициент спектральной яркости - отношение яркости излучения, вышедшего из толщи поверхности, к яркости эталонного рассеивателя, освещенного солнцем и светом небосвода; взаимоотносительные спектральные отражательные характеристики. Отмечается, что сложность и многосторонность пространства факторов формирования спектрального сигнала, принимаемого дистанционным датчиком, определяет и стратегию экспериментальной программы изучения закономерностей отражения - излучения в связи с бпогеофизическими показателями состояния геосистем.
Для почв, покрытых растительностью, в отраженном световом потоке можно выделять составляющие, образованные почвенной поверхностью, растительной поверхностью и многократными переотраженпямп от границ воздух - растительность и растительность - почва (или более тонкой сложной структурой типов растительности и типов почв). Коэффициент отражения от двухслойной среды (растительность - почва) можно представить в виде

где Фр - коэффициент отражения поверхности растительности без учета влияния почвы; Фп - коэффициент отражения поверхности почвы, не покрытой растительностью; αр - постоянная распространения растительности

m - масса единичного объема растительного слоя.
На отражательные свойства оказывает также влияние запыленность растительной массы, ветер, тип минерального питания растении, концентрация в атмосфере водяного пара, заспежеиность и др.
Несмотря на некоторые успехи дистанционного контроля элементарных пространственно однородных участков, существуют известные сложности перехода от точечных к измерениям площадей, например, влажности почв. В естественных условиях отражательные свойства различных участков почв даже одного типа могут отличаться в шесть и более раз. Поэтому необходимы статистические усреднения по времени, пространству (площадь, глубина) и спектрам. Б. В. Виноградовым предлагается следующий алгоритм получения итоговой информации о влажности почв:
- статистический и физический анализ связей между информативными параметрами электромагнитных сигналов и влажностью почв;
- интерпретация однозональных и единовременных изображений;
- интерпретация однозональных и разновременных изображений двух сроков;
- интерпретация разновременных и многоспектральных изображений.
Использование этого алгоритма для длин электромагнитных волн λк=0,6 ... 0,7 (красный диапазон) и λик=0,8 ... 1,1 мкм (ближний инфракрасный диапазон) дало различные максимальные контрасты системы влажная почва - сухая почва - разреженная зеленая растительность - густая зеленая растительность.
Нахождение оптимума по критериям "размер зондирующего пятна - площадь исследуемой поверхности - погрешность измерении" составляет одну из важнейших технико-экономических подзадач всей процедуры дистанционного контроля.
Для оценки состояния сельскохозяйственных культур используют также активные радиолокационные методы. Экспериментальные данные показали заметную корреляцию (до значений 0,8 ... 0,9) между интенсивностью отраженного сигнала и влагозапасами растительности и почвы, состоянием посевов. Подтверждена зависимость параметров радиолокационного сигнала в начале и конце вегетационного периода от биометрических показателей. Эффективность активного радиолокационного метода может быть повышена при многополяризационном и многочастотном режимах работы.
Большое распространение получил пассивный радиометрический метод индикации биолитосферных образований. СВЧ-диапазон, в отличие от видимого и инфракрасного, обладает преимуществом глубинного и послойного контроля почв и растительности. Причем на излучательной способности в сантиметровом и дециметровом диапазонах сказывается влияние как диэлектрической проницаемости, так и электропроводности исследуемой поверхности (с увеличением, например, влажности наблюдается квазилинейный рост относительной диэлектрической проницаемости и электропроводности). При этом крутизна радиояркостной температуры при λ0=0,8 ... 20 см составляет 2 ... 5 К на процент влажности (в диапазоне 5 ... 30%) при плотностях грунтов 1,2 ... 1,8 г/см3, а перепад для сухой - влажной почвы заключен в пределах температур 60 ... 90 К, коэффициент излучения для сухого грунта принимает значения 0,85 ... 0,95, а для влажного 0,50 ... 0,80. Для нормального состояния сельхозпосевов диэлектрическая проницаемость принимает значения 1,1 ... 1,5, тангенс угла потерь 0,01 ...0,5, глубина проникновения при λ0=0,03 м для пшеницы - 1,3, всходов овса - 0,7, всходов картофеля - около 0,6 м, коэффициент излучения 0,90 ... 0,99.
Замечено, что излучателыю-влажностный контраст почв в СВЧ-диапазоне существенно более высокий, чем в ИК-Диапазоне.
Основным показателем радиометров является чувствительность, зависящая от принципов их построения и ограниченная собственными шумами и нестабильностью коэффициента усиления приемного устройства. Наиболее простая схема радиометра (радиометр полной мощности) изображена на рис. 4.1.
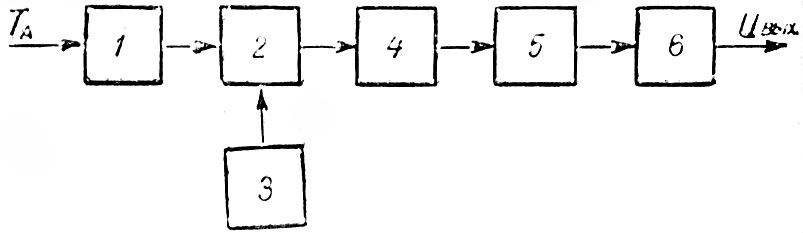
Рис. 4.1. Структурная электрическая схема немодулированного СВЧ-радиометра (радиометр полной мощности)
Излучение ТА от контролируемой среды поступает через Приемную антенну в усилитель высоких частот 1, далее преобразуется в преобразователе частоты 2 с помощью гетеродин-лого генератора 3 в колебания промежуточной частоты, усиливаемые блоком 4, затем детектируется квадратичным детектором 5 и интегрируется устройством 6. Без учета потерь выходное напряжение имеет вид

где τд - постоянная времени детектора;
k - постоянная Больцмана;
Kпp - коэффициент усиления приемника;
Δƒпр - полоса пропускания приемника по высокой частоте;
T ш пр - шумовая температура приемника.
При этом температурное разрешение составит
где τ - постоянная времени интегратора.
Недостаток этой схемы состоит в том, что абсолютная погрешность измерений является функцией измерения коэффициента усиления приемника и температуры шума приемника.
Р. Дике предложил улучшенную схему (радиометр сравнения), согласно которой (рис. 4.2), с помощью молекулярного переключателя 7, синхронного детектора 8 и синхронизатора 9 поочередно принимается излучение контролируемой среды ТА и контрольной (калибровочной) нагрузки Т0.

Таким образом, в результате когерентного детектирования получаем
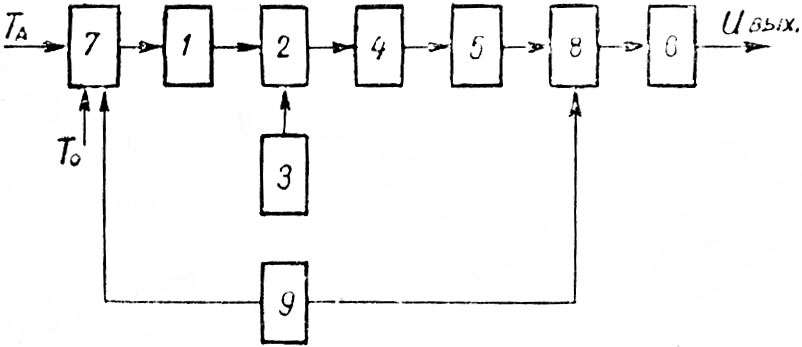
Рис. 4.2. Структурная электрическая схема радиометра сравнения (радиометр Дике)
В результате выходное напряжение радиометра не зависит от изменения Т ш пр, а температурное разрешение ΔT уменьшается в два раза.
Радиометр с нулевой обратной связью (рис. 4.3) содержит дополнительно регулируемый генератор прямоугольных сигналов 10 и имеет

Импульсные помехи (Тп) вводятся от генератора 10, регулируемого выходным сигналом интегратора 6, в контур антенного переключателя 7. При этом аналитический вид разрешения представлен следующим образом:
Шумовая температура Тш пр и ширила полосы Δƒпр обусловлены первыми каскадами приемника. Известные радиометры имеют Тш пр=50 ... 4000 К. В дециметровом - миллиметровом диапазоне принимаемых сигналов излучения контролируемых сред наиболее распространены с упер гетеродинные приемники, надежные в работе и конструктивно относительно простые. Их шумовая температура за счет преобразования частоты составляет около 60 К, однако они узкополосны (10 ... 60 МГц) за счет ограниченной полосы пропускания усилителя промежуточной частоты. Улучшенными показателями (Тш пр, Δƒпр) обладают усилители на базе ламп бегущей волдиодов.
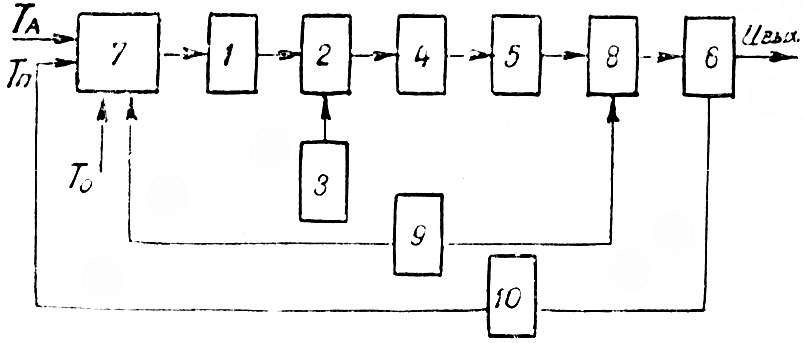
Рис. 4.3. Структурная электрическая схема СВЧ-радиометра с нулевой обратной связью (радиометр Дике)
Немаловажную роль в литоеферных исследованиях играет дистанционный контроль сезонного снежного покрова (границы покрова, глубина, плотность, температура, влагосодержание). Эта неустойчивая с термодинамической точки зрения среда чрезвычайно изменчива в пространстве и времени по своим геометрофизическим свойствам.
Для контроля границ площадей используют видимый и ближний ИК-диапазон (но в этом спектральном интервале сильно мешают облака, из-за их схожих со снегом значений радиояркостных температур).
Кластерный анализ принятых излучений на длинах волн 750 и 1500 нм (рис. 4.4) показал возможность качественно-информативной обработки и получения данных о системе снег - 1, совокупность деревьев и снега - 2, деревья - 3.
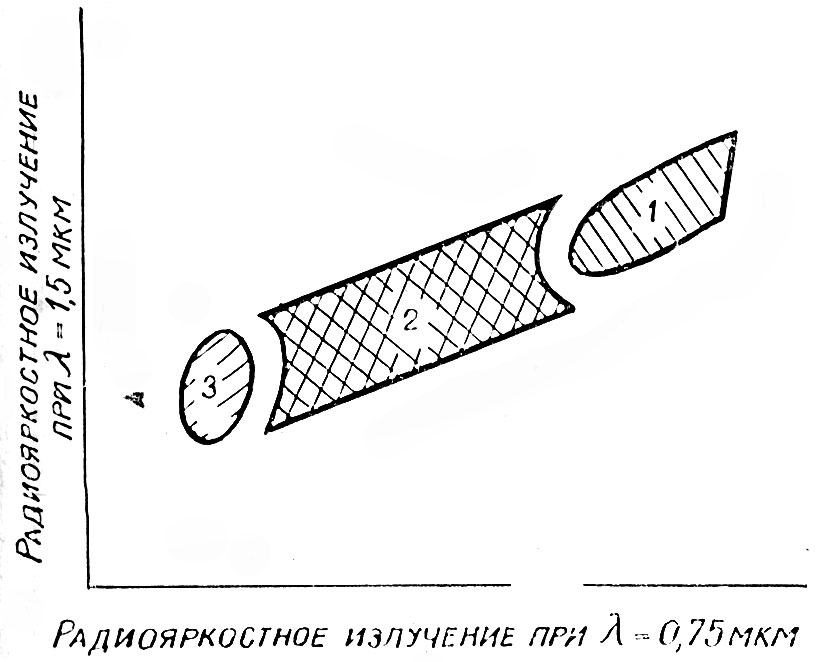
Рис. 4.4. Результаты совместных двухчастотных радиометрических измерений
Определенные преимущества заложены в микроволновом приеме термодинамического излучения с целью однозначного различения границы снег - почва. Радиояркостный контраст указанной границы в данном диапазоне волн достаточно велик, к тому же облака и атмосфера незначительно ослабляют миллиметровые и сантиметровые волны.
Ослабление гамма-лучей (естественного земного или искусственного происхождения) можно использовать для дистанционной оценки водного эквивалента (произведение глубины и плотности) слоя снега с высот 50 ... 150 м. С этой же целью целесообразно применение и микрорадиоволн. На рис. 4.5 изображена экспериментальная зависимость раднояр-костной температуры Тя снега от толщины (при одинаковой плотности снега) снежного покрова при различных длинах радиоволн λ0 и угле приема излучения 45°.
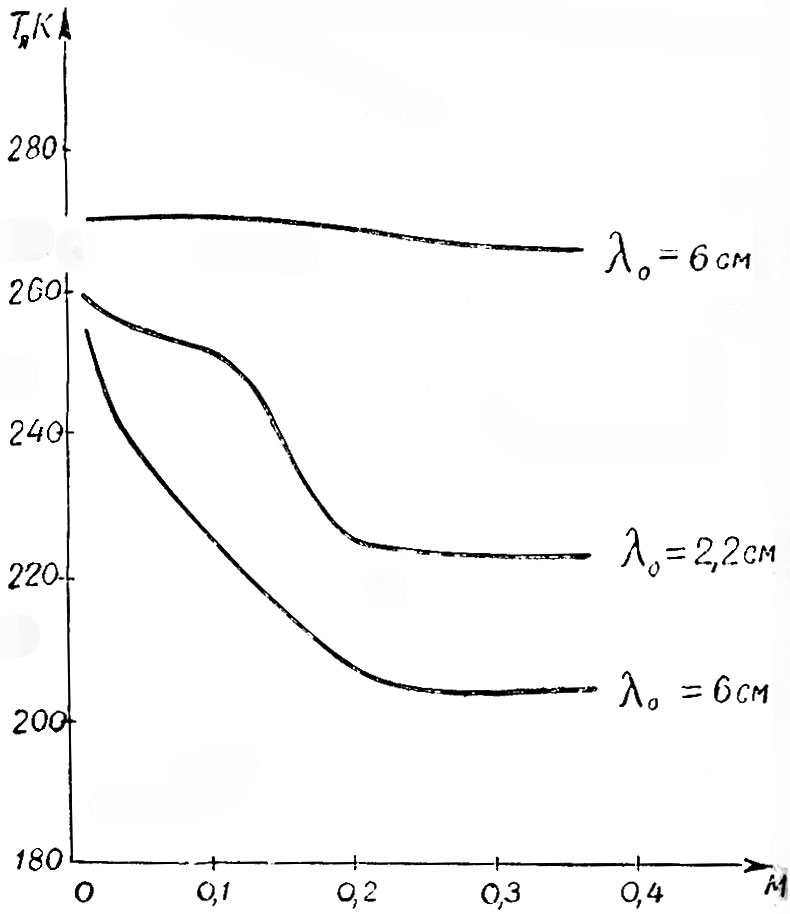
Рис. 4.5. Зависимость радиояркостной температуры снежного покрова от его толщины
Поставленная задача (определение водного эквивалента) решается с помощью, как минимум, двух зондирующих частот и при использовании математических моделей технических средств и экологических объектов.
Требуют своего оперативного контроля и такие вариабельные характеристики снега, как температура и влагосодержанне. Эти величины определяют друг друга: если температура снега меньше 0°С, то его влагосодержанне равно нулю, если содержание влаги отличается от нуля, то температура равна 0°С. Измерения в диапазоне волн 1 мм ... 10 см подтверждают практические возможности радиояркостной аэроиндикации площадей (S), занятых сухим снегом 1, мокрым снегом 2, и бесснежной поверхности 3, покрытой растительностью (рис. 4.6).
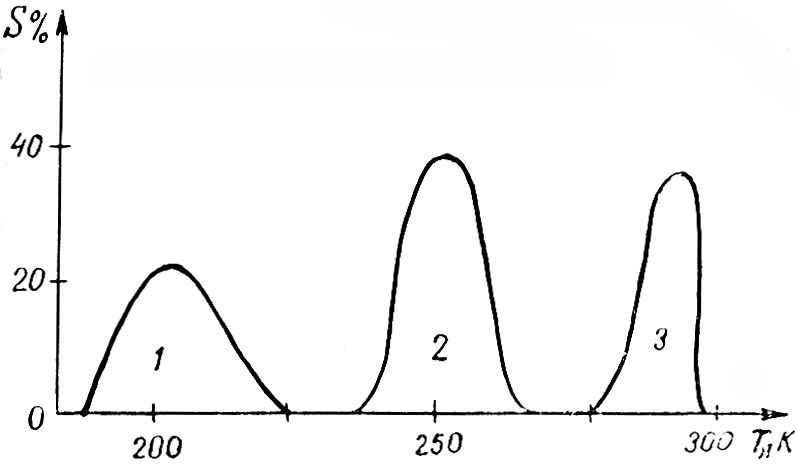
Рис. 4.6. Зависимость радиояркостной температуры от площадей, занятых снегом и растительностью
Одним из практически полезных методов почвенного контроля является метод поверхностных радиоволн в различных его вариантах.
К поверхностным радиоволнам относят электромагнитные волны, которые при своем распространении как бы прижаты к земной поверхности. Примером поверхностных радиоволн могут служить волны, излучаемые радиовещательными станциями. Присутствие земной (полупроводящей) подстилающей поверхности приводит к следующим изменениям структуры электромагнитного поля над этой средой:
- изменяется амплитуда вертикально поляризованной электрической компоненты Ев; происходит ее уменьшение за в пределах прямой видимости имеет вид счет увеличения расстояния R от излучателя, а также за счет конечного значения электропроводности земной поверхности;
- изменяется фаза φв вертикальной электрической компоненты;
- появляется продольная горизонтальная электрическая составляющая Ег амплитуда и фаза которой связаны функционально с амплитудой и фазой Ев;
- сказывается сферичность земной поверхности на параметрах компонент поверхностной волны при определенных расстояниях от излучателя до приемника.
Рассмотрим возможности контроля по фазе вертикальной электрической компоненты поверхностной волны. При R << λ0 значение φв монотонно растет и при некоторм R становится постоянным и определяется электрофизическими свойствами подстилающей поверхности; причем ее значение для k-го участка зависит только от свойств этого участка и не зависит от предыдущих участков трассы распространения радиоволны.
Аналитическое выражение для фазы φв в пределах прямой видимости имеет вид
где

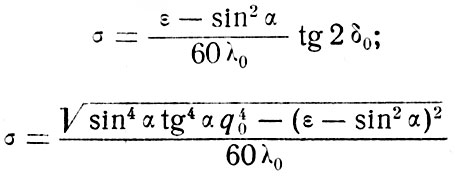
Известные методы, и в частности радиоинтерференционные методы измерения фазы поверхностной радиоволны, дают существенную погрешность (около 3°), которую при проведении аэроизмерений весьма затруднительно уменьшить. В связи с этим было предложено в месте излучения генерировать два гармонических колебания: одно базовое (по которому производится оценка влияния ε и σ на φк) с длиной волны λ, а другое опорное с длиной волны λ2 << λ1 и модулированное волной λ1. На приемном конце трассы проходит сравнение базового сигнала и выделенного из опорного модулирующего, испытывающего на себе сравнительно меньшее влияние εк и σк участка почвы.
Для базового колебания имеем

где

а для фазы амплитудно- модулированного колебания

Фаза огибающей амплитудно-модулированного сигнала в этом случае равна

Тогда разница фаз Δφв, получаемая на приемном конце над k-u участком, определится следующим образом:
Методическая погрешность предложенного способа определяется, в основном, дополнительным набегом фазы
Результаты расчетов Δφв (в градусах) при различных длинах волн λ1 и λ2 и электропроводности а (См/м) приведены в табл.4.2-4.6. Выделенная линия характеризует границу применимости данного метода (правая область неприменима для контроля).
Таблица 4.2. λ1=100 м, λ2=1 м
Таблица 4.3. λ1=200 м, λ2=1 м
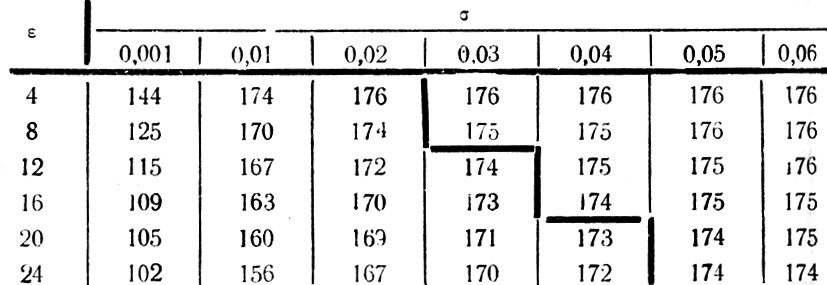
Таблица 4.4. λ1=100 м, λ2=2 м
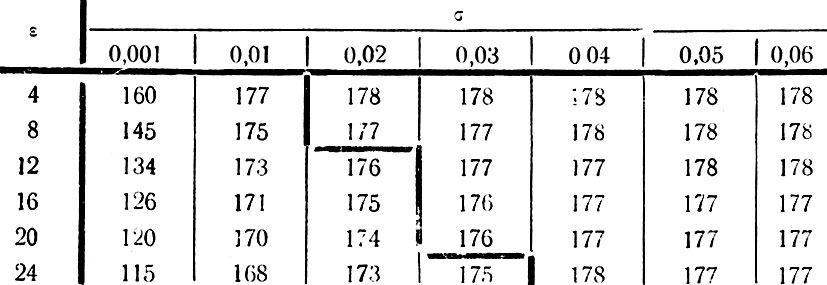
Таблица 4.5. λ1=200 м, λ2=2 м
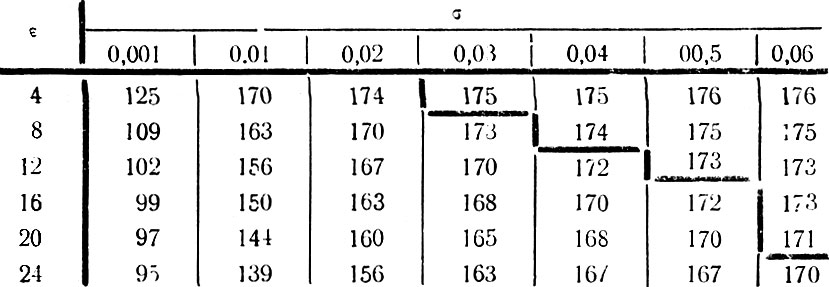
Таблица 4.6. λ1=50 м, λ2=1 м
Неконтактный контроль природных вод
Наиболее изученными дистанционными неконтактными методами контроля температуры воды являются измерения термополей по их отражательной или излучательной способности по отношению к электромагнитным волнам светового, инфракрасного и СВЧ-диапазонов.

Неконтактный контроль природных вод
Вариации температуры в пределах 10 ... 50°С изменяют коэффициент отражения оптических волн менее чем на 5%. Ощутимым источником термического состояния воды является сама вода. Ее "пассивная" генерация широкоспектрального диапазона электромагнитных волн позволяет, в частности, интерпретировать принимаемую мощность (так называемую радиояркостную температуру) в температуру воды.
Тепловой баланс приемника, расположенного над водной поверхностью, можно представить в виде следующего выражения:

где Тя1 - тепловой поток от окружающих деталей приемника;
Тя2 - приток тепла, связанный с условиями работы приемника;
Тя - приток тепла от излучения водной среды;
Тя3 - отвод тепла в результате самоизлучения приемника;
Тя4 - тепло, отдаваемое за счет непосредственного контакта приемника с окружающей средой.
Несмотря на то, что для ИК-диапазона погрешность индикации, согласно функции Планка, оказывается в 5 раз меньше, чем в микроволновом диапазоне, влияние атмосферных помех и температурно-солевых вертикальных неоднородностей ограничивает это преимущество. Прием СВЧ-излучения ограничивает влияние непрозрачности атмосферы, хотя абсолютные измерения в этом диапазоне затруднительны ввиду влияния на радиояркостную температуру сопутствующих факторов. Совместное решение проблем точности и помехоустойчивости, многоспектральные измерения, очевидно, приведут к оптимизации решаемой задачи.
Ряд самолетных испытаний радиотепловых датчиков на примере инфракрасных радиометров (8 ... 13 мкм) в сложных Метеорологических условиях дали погрешность 0,7 ... 1,5, другие - 0,1 ... 0,6°С. Имеются также сведения об экспериментальных испытаниях двухканального радиометра (3,4 ... 4,1 и 4,5 ... 5,1 мкм) с непрерывной калибровкой путем регистрации излучения неба, первого черного тела, воды и второго мерного тела. Причем определение температуры водной поверхности производилось экстраполяцией радиометрических данных с разных высот полетов (50, 100 и 150 м) и достигаемая при этом погрешность составила 0,01°С. При увеличении угла наблюдения от вертикали до 30° погрешность практически не менялась, после 40° начинала расти, а после 50° - почти удваивалась. Расчеты показывают, что при высоте полета до 200 м погрешности вследствие влияния атмосферной дымки не превышают аппаратурных и почти не зависят от градиентов температуры воздуха. Для высот более 300 м эти погрешности резко растут. Теплообразование и волнение водной поверхности могут оказывать существенное (даже подавляющее) влияние на результаты ИК-измерений.
Зависимости Тя (Т, S, λ0) носят в СВЧ-днапазоне нелинейный характер. Исследования привели к выводу об устойчивости этой зависимости в диапазонах λ0: 0,8 ... 1,6; 5 ... 10 и 25 ... 30 см при вариациях контролируемых величин 0≤Т≤30°С; 0≤S≤40 г/кг; 0≤υ≤25 м/с (υ - скорость ветра, Т - температура воды, S - соленость воды).
СВЧ-диапазон наиболее чувствителен к изменениям температуры воды на миллиметровых и сантиметровых радиоволнах, для дециметровых волн и далее возрастает роль минерализации и увеличиваются помехи за счет подсветки небосвода. В частности, измерения Т рядом исследователей при λ0=3,4 и 8,5 см показали возможность контроля температуры верхнего миллиметрового слоя воды с ошибкой 0,5°С (при чувствительности радиометра 0,1 К), на волнах 10 ... 20 см погрешность с высоты около 1,5 км составила менее 1°С.
Измерение электропроводности с целью контроля минерализации предполагает прием пассивного излучения в дециметровом диапазоне. Для таких частот при Т=290 К и вертикальном приеме излучения, с учетом известного выражения Тя=Т(1-ф2), получаем следующие данные. В интервале 0,02 ... 0,1 См/м электропроводность можно определить с погрешностью до 0,01 См/м, если погрешность Тя составит 0,7 К, а в интервале 1,0 ... 5,0 См/м такая ошибка контроля приведет к неточности измерения электропроводности около 0,1 См/м.
Измерения информативной величины Тя обусловленной электропроводностью, сопряжены с трудностями индикации температуры порядка Тя≈100 К на фоне шумовых температур, что связано со сложностью создания малошумящих приемников (Тшпр < 10 ... 30 К), имеющих массу, габариты, потребляемую мощность и время непрерывной работы, реальные для размещения на аэроносителе.
Известен также активный поляризационный метод аэроконтроля электропроводности вод. При облучении материальной среды электромагнитной волной с круговой поляризацией происходит не только отражение и поглощение волны, но и изменение ее поляризационной структуры - круг, например, превращается в эллипс. Степень деполяризации отраженной волны зависит, в частности, и от удельной проводимости отражающей поверхности (структуры).
Связь между электропроводностью и поляризационными параметрами описывается следующими уравнениями:
где q0 - отношение амплитуд лево- и правополяризованной компонент отраженной волны;
δ0 - разность фаз между лево- и правополяризованной компонентами отраженной волны;
α0 - угол зондирования (между вертикалью и направлением зондирования).
Угол зондирования а определяет прц амплитудных измерениях (для одной и той же λ0) уровень абсолютного значения информативного параметра q0. Причем разница уровней наиболее существенна для значений σ>2 ... 3 См/м.
Результаты фазовых измерений в широком интервале углов зондирования практически не зависят от значений этих углов. Уменьшение длины радиоволн приводит к спрямлению зависимости δ0(λ0), т. е. ошибки контроля электропроводности при заданной ошибке определения разницы фаз распределяются более равномерно.
Рассмотрим аппаратурные погрешности поляризационного метода по модулю q0 и разности фаз δ0:
Погрешности, вносимые нестабильностью излучаемой длины волны, при современном уровне техники составят незначительную долю - менее 0,1%.
Анализ показывает, что при измерениях σ по разности фаз δ0 в диапазоне 0,5 ... 4,0 См/м при λ0=0,5 ... 2,0 м и ошибках Δλ0=10-6 м, Δλ0=0,5° погрешности достигают 10%.
При контроле в диапазоне 0,5 ... 1,5 См/м для λ0=2 м можно определить электропроводность с погрешностью 0,05 (Δδ0=0,5°), 0,02 (Δδ0=0,2°) и 0,01 См/м(Δδ0=0,1°). В интервале 3,0 ... 4,0 См/м на той же длине волны λ0=2 м получаем погрешности: до 0,4 (Δδ0=0,5°); 0,15 (Δδ0=0,2°) и 0,08 См/м (Δδ0=0,1°).
Данные расчетов по параметру q0 свидетельствуют о том, что в широком диапазоне измерений углов визирования (α=10 ... 50°) погрешности измерений электропроводности практически неизменны для фиксированных длин зондирующих радиоволн (например, 0,5; 1,0; 2,0; 5,0 м) и постоянной ошибке Δq0=1%, хотя измерять отношение двух сигналов технически проще при углах зондирования α>30° (т. к. значения q0 в этом случае находятся в пределах 30 ... 150). При λ0=2 ... 5 м, α=20 ... 45°, Δλ0=10-6 м, Δq0=1 % в диапазоне σ=0,5 ... 6,0 См/м получаем погрешность измерений по этому варианту метода порядка 2% или, соответственно для диапазонов 0,5 ... 2,0 и 3,0 ... 4,0 См/м погрешности составят 0,03 ... 0,04 и 0,06 ... 0,08 См/м.
Практическое осуществление метода по двухпозиционной системе облучения-приема водной поверхности предполагает отклонения от заданной геометрии этой системы, а именно, качание излучателя в горизонтальной и вертикальной плоскостях и изменение высоты расположения излучателя и прием ка. Необходимо указать условия устранения помех за счет аэродинамических эффектов и оценить предельно допустимые значения названных факторов.
Рассмотрим рис. 4.7. Здесь И - точка излучения, П - точка приема (расположена на борту аэроносителя), О - точка идеального отражения от водной поверхности, Н - высота расположения источника излучения и его приема над повеШ ностыо водоема, L - расстояние между источником и приемником излучения, И1 и И2 - тонки противоположных отклонений излучателя в вертикальной и горизонтальной плоскостях, ΔН - изменения высоты полета, β - угол качания излучателя, Δh - радиус качания излучателя вокруг точки И.
Известно, что за участок, существенно участвующий в отражении, принимают первую зону Френеля (в данном случав она представляет собой эллипс с полуосями а1 и b1, предполагая в ней стационарность фазы и амплитуды отраженного сигнала. Поэтому для определения оценок вышеназванных факторов мы найдем предельные факторы (ΔН и Δh), когда луч падения не выходит за размеры первой зоны Френеля, а точнее, окружности на водной поверхности с радиусом малой полуоси b1.
Изучив геометрию падения-отражения лучей на крайние точки первой зоны Френеля за счет дестабилизирующих факторов, мы видим, что радиус вращения Δh точки излучения вокруг горизонтальной линии не должен превышать значении b1tgΘ, а изменение высоты полета ΔН должно быть не более значения b1.
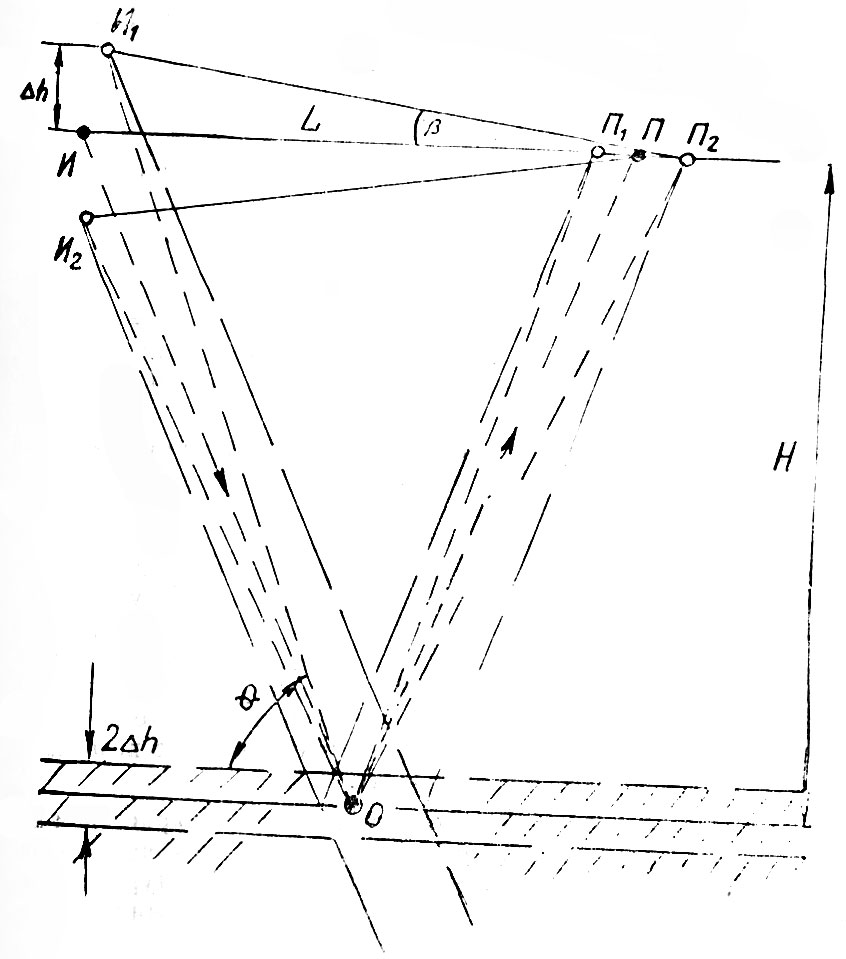
Рис. 4.7. Геометрия аэродинамических изменений прие прима-излучения аэроконтроле акваторий
Взяв случай одновременности действия обоих факторов, получаем предельное увеличение радиуса зоны формировании отражения в два раза (когда источник излучения находится в точке И1 а линия И1П опускается на высоту ΔН или наоборот, когда источник находится в точке И2, а линия И2П подинается) При варианте, когда источник излучения находится в точке И1, а линия И1П поднимается пли когда источник находится в точке И2, а линия И2П опускается, радиус окружности формировании не выходит за пределы первой зоны Френеля при соответствующих предельных значениях ΔН и Δh
В случае, когда источник излучения и приема находится на одинаковой высоте Н, меньший радиус b1 первой зоны Френеля находится из выражения

Тогда предельно допустимые дестабилизирующие факторы будут равны

В частности, для λ0=2 м, Н=100 м (L=115,47 м, Θ=90°-α=60°) эти величины примут значения: ΔH<5м, Δh<8 м. Эти предельные значения практически осуществимы.
Пассивный радиояркостный и активный радиояркостный методы контроля параметров волнения используют диапазон зондирующих волн от видимого до метрового. Основу физико-математической интерпретации данных зондирования составляют модели взволнованной водной поверхности: мелкошероховатая (неровности, образующие шероховатую поверхность, пологи и малы по сравнению с длиной зондирующей волны), с крупными неровностями (радиус кривизны неровностей значительно больше длины зондирующей волны, при этом на высоту неровностей ограничения по высоте не накладываются), со сложной шероховатостью (мелкие неровности наложены на крупные неровности).
Решение оптимизационных вопросов в радиояркостном методе приводит к выводу, что одновременный контроль, например, трех гидропараметров - волнения, температуры и солености рационально проводить соответственно в миллиметровом, сантиметровом и дециметровом диапазонах.
Активный радиолокационный метод предполагает прием и обработку (амплитудную, энергетическую, частотную, фазовую, поляризационную, пространственную, временную) сигнала, отраженного от взволнованной поверхности. В последние годы получают особое развитие устройства лазерной локации параметров волнения.
Дистанционному контролю подвергаются такие параметры нефтяных загрязнений, как площадь покрытия, толщина, примерный химический состав, пространственно-временная динамика названных показателей. В исследованиях делается вывод о наиболее перспективных методах неконтактного контроля: лазерный отражательный, лазерный флюоресцентный, фотографирование в поляризованном свете, микроволновый радиометрический и др. Расчеты и экспериментальные измерения показывают, что в инфракрасном диапазоне (3,0; 6,0; 10,0 ... 12,0 мкм) коэффициенты отражения чистой и нефтезагрязненной поверхности резко отличаются (причем в диапазоне 10,0 ... 12,0 мкм контраст максимален и достигает значений 4 ... 6; в этом же диапазоне находится окно прозрачности атмосферы и минимально влияние изменений солености и температуры воды). Микроволновый (3 ... 100 ГГц) радиометрический способ показал хорошую приспособленность для контроля толщин нефтепленок более 0,1 мм.
На рис. 4.8 изображены зависимости прироста радиояркостной температуры от соотношения толщины пленки (d) и частоты зондирования.
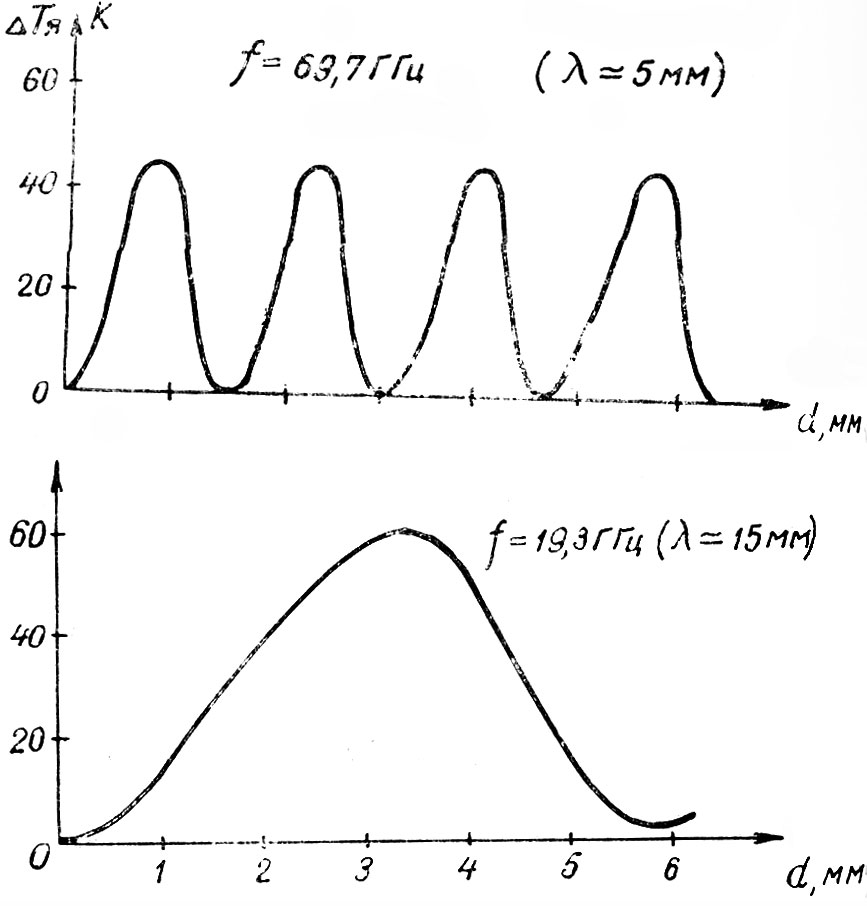
Рис. 4.8. Зависимость прироста радиояркостной температуры от толщины нефтяной пленки
Флюоресцентный метод, основанный на поглощении оптических волн нефтью и отличии спектров свечения легких (λ0=360 ... 460 нм) и тяжелых (около 520 нм) фракций нефти. Несмотря на малый энергетический выход люминесценции, этот метод отличает высокая чувствительность (до 10-10 грамм вещества в литре воды), высокая селективность ввиду отличия длины волны возбуждения и люминесценции и отсутствия люминесценции у некоторых компонентов нефти (хотя поглощение энергии этими компонентами происходит). Оптимальный выбор длины возбуждающей волны позволяет по амплитуде и форме нормированных спектров флюоресценции идентифицировать типы нефтепродуктов.
Активные СВЧ-радиолокационные методы способны обеспечить картографирование нефтяных загрязнений в любое время суток, при наличии тумана и осадков, при волнении моря до 2 баллов.
Одним из интегральных показателей (вместе с электропроводностью) водной среды является ее цвет. Цвет природных вод вблизи линии горизонта почти полностью определяется цветом небесного света, отраженного от водной поверхности (голубой - в ясную погоду, серовато-голубой - при увеличении в атмосфере концентрации аэрозолей, серый - в пасмурную погоду; цвет морской поверхности становится белым при отражении в нем белого облака или принимает красноватые оттенки на восходе или закате солнца). Цвет вертикально восходящего света от водной поверхности несет информацию о внутреннем содержании водной среды.
С середины XIX в. (первые оптические исследования морей были проведены в начале XVIII в. основателем фотометрии П. Буге) ученые пытались по-разному объяснить собственный цвет водной среды. Р. Бансен (1847 г.) интерпретировал голубой цвет чистой воды на основе теории поглощения света. Е. Тиндолл (1871 г.) и Е. Айткен (1882 г.) рассматривали цвет воды с позиции деполяризации отраженного света. Р. Рэлей объяснял цвет с точки зрения отраженного излучения небосвода. Одна из наиболее важных работ по изучению цвета водной поверхности была написана физиком С. Paманом (1922. г.) с применением теории флюктуации в жидкостях. К. Раманатан (1923 г.) рассматривал отражающие и поглощающие свойства чистой и природной воды, утверждая, что по мере увеличения количества взвешенного вещества цвет изменяется от голубого до зеленого, зеленовато-белого и белого, отмечая влияние на это фотолюминесценции. В. Шулейкин (1923 г.) изучал роль молекул воды и крупных частиц в отражении света, а также поглощение света молекулами воды и растворенными веществами. Н. Ерлов (1974 г.) провел многофакторные исследования в этой области. Модельно-экспериментальные вычисления Г. Пласса и др. по методу Монте-Карло с учетом рассеивания (поглощение, отражение) в воздухе и воде утверждают: восходящее из воды излучение имеет темно-голубой цвет для чистой воды; если в воде содержится среднее постоянное количество гидрозолей, а содержание хлорофилла и желтого вещества увеличивается, то цвет становится зеленовато-голубым, зеленым; при дальнейшем увеличении содержания хлорофилла и желтого вещества цвет становится желто-зеленым (без учета влияния пасмурной погоды, облаков, морского дна, волнения водной поверхности, загрязнений).
В определенном диапазоне длин волн λ0 и на высоте h спектральная яркость излучения равна

где Яλh(1) и Яλh(0) - яркости излучения, рассеянного атмосферой и исходящего от волновой поверхности;
Фλh - спектральный коэффициент передачи атмосферы на высоте;
Яλh(01) - яркость излучения от водной поверхности (h≈0);
Яλh(02) и Яλh(03) - яркость излучения, рассеянного назад в водной толще и отраженного от дна (h≈0).
В приведенном выражении величина Яλh(02) несет информацию о составе водной массы, которая и может служить критерием содержания в ней хлорофилла. Задача селекции сигналов, составляющих суммарную спектральную яркость Яλh по факторам, определяющим их, весьма сложная.
Основным препятствием дистанционному контролю цвета моря является обратное рассеяние солнечного света атмосферой. Это рассеяние, состоящее из прогнозируемого рассеяния Рэлея (при λ0=450 нм оно примерно в 5 раз больше, чем при λ0=670 нм) и непрогнозируемого рассеяния Ми (за счет аэрозольных частиц) составляет основную часть принимаемого сигнала.
Световой поток, проникая в водную толщу, создает в ее верхнем слое фотическую зону (нижняя граница определяется 1%-й облученностью), в которой реализуются процессы фотосинтеза. Комиссией ЮНЕСКО установлены фото-сннтстнчески активные длины электромагнитных волн 350 ... 700 нм. В этом же диапазоне находятся характерные полосы поглощения хлорофилла.
Первые аэроизмерения цвета водной среды проведены в 60-е годы. Г. Кларк, Г. Ивинг и К. Лоурензен выполнили спектрофотометрические измерения в интервале длин световых волн 400 ... 700 нм для концентраций хлорофилла от 0,3 до 3,0 мг/м3. Полученные ими результаты свидетельствуют, что наличие в воде хлорофилла вызывает уменьшение светового потока в голубом участке спектра и его увеличение в зеленом. Р. Рэмси получил теоретические зависимости коэффициента отражения от концентрации однородно распределенного в океане хлорофилла (0 ... 100 мг/м3).
Большая часть имеющихся работ касается исследования возможностей корреляции концентрации хлорофилла с отношением интенсивности отраженного зеленого света (540 нм, поглощение хлорофиллом минимально) и голубого (460 нм, сильное поглощение хлорофиллом), а также связи с интенсивностью красной полосы (685 нм) спектра. Характерно, что глубина проникновения в воду первых двух длин зондирующих волн составляет около 70, а третьей - 5 м, однако интенсивность красной линии относительно меньше и она подвержена заметному атмосферному поглощению. Для устранения погодного фона неба и его изменений предложено наблюдение водной поверхности под углом Брюстера (примерно 53° от вертикали), при котором отраженный от водной поверхности свет является плоскополяризованным, отделяемым поляриметром.
Представляет интерес контроль модификаций хлорофилла. В листьях содержится в большом количестве хлорофилл а (сине-зеленый), в 2-5 раз меньшем количестве - хлорофилл в (зеленый), хлорофилл с, d и множество желтых и других цветов спутников хлорофилла - каротиноидов. Хлорофиллы а и в присущи высшим растениям, а в некоторых водорослях (бурых, диаматовых) найдена к тому же и модификация с, в красных водорослях найден хлорофилл d. Характерная длина волны поглощения у хлорофилла а равна 672 для молодых водорослей, 683 - для сформировавшихся, около 695 нм - для старшего возраста.
В. Н. Пелевиным и другими исследователями для вод Индийского океана был проведен анализ спектров рассеянного излучения, снятых с борта самолета. Он показал, что с увеличением концентрации фотосинтетических пигментов снижалась яркость света в синей области спектра и относительно повышалась в зеленой. Обнаружилось, что при λ0=380 ... 415 нм доминирует поглощение желтого вещества (окрашенные гумусовые продукты разложения органического вещества), при λ0=430 нм наблюдается полоса поглощения хлорофилла и сопутствующих пигментов (минимум интенсивности излучения), а при λ0>460 нм резко возрастает поглощение самой воды. Отмечается справедливость этих выводов для алпготрофных вод (концентрация хлорофилла свыше 0,1 ... 0,2 мг/л).
Авиационные измерения рассеянного назад светового потока с высот 300 м, сделанные И. А. Терсковым и др. (для λ0=570, 640 и 680 нм в узких спектральных окнах (15 нм) относительно калибровочных точек для регистрации хлорофилла в поверхностном слое оз. Байкал), дали погрешность менее 40%. Полученные данные показали возможность определения распределения хлорофилла в поверхностных водах (при совместных летных и судовых измерениях), а также возможность относительных измерений концентрации хлорофилла (при одних летных измерениях) в диапазоне 0,07 ... 0,23 мг/л.
Отмечается, что поскольку выходящий дневной свет проходит многократное рассеяние, то эффективная длина его прохождения достигает сотен метров, что позволяет говорить об обнаружении весьма малых концентраций рассеивающих компонентов. В сравнительно чистых водах спектральное распределение выходящего излучения обусловлено молекулярным рассеянием и поглощением самой водой. В то же время непосредственное измерение спектра трудоемко и сложно. Поэтому в 1974 г. предложено для оценки биологической продуктивности вод измерять отношение интенсивностей пассивно излучаемого света для двух узких характерных полос в синей и зеленой областях (хлорофилл обладает сильным поглощением в диапазоне 430 ... 480, минимальным в диапазоне 550 ... 650 нм). Однако, если присутствие желтого вещества не вносит помех при относительных оценках содержания хлорофилла, т. к. увеличение концентрации желтого вещества идет в том же направлении, что и концентрация хлорофилла, то при абсолютных измерениях требуется дополнительный контроль яркости выходящего излучения в более коротковолновой части спектра 380 ... 400 нм. Необходимо обратить внимание на незначительное влияние облаков на отношение характерных полос интенсивностей, хотя отдельное облако, закрывающее солнце, вносит существенные помехи. Изменение высоты солнца начинает сказываться лишь при его высотах менее 10 ... 15°, вызывая уменьшение отношения интенсивностей зеленой и синей полос спектра. В. И. Бурснков и соавторы полагают, что нельзя не учитывать вклад чистом воды в рассеяние назад. Например, для λ0=550 нм доля чистой воды в показателе рассеяния под углом наблюдения и надир может составить для океанических вод более 50% и менее 10% только в очень мутных водах. Для взвесей роль частиц радиусом менее 100 им преимущественна, больший размером компоненты доминируют при малых углах рассеяний (при углах более 45° их вклад составляет менее 3%).
М. Н. Козлянинов и И. В. Семенченко теоретически и экспериментально обосновали правомерность применения для неконтактного корреляционного контроля спектрального коэффициента яркости ρ (отношения яркости выходящего излучения к яркости идеального рассеивателя, находящегося на поверхности моря).
Экспериментальные измерения значений ρ для различных вод показывают его динамичность, особенно для сине-зеленого диапазона (450 ... 550 им).
Б. В. Новогрудинский и К. С. Шифрин рассмотрели теоретические и практические вопросы использования коэффициента диффузного отражения (при λ0=462 и 573 нм) для неконтактного контроля за содержанием хлорофилла. Пред лагаемая методика требует знания освещепностей (яркостей), создаваемых солнцем и небосводом на поверхности воды, п определения диффузно рассеянного света (чему препятствует фрспслсвскос отражение, в частности, за счет сильно флюктуирующих солнечных бликов).
Ряд исследователей проанализировал в диапазоне 430 ... 470 нм связи между спектром показателя поглощения морской воды и пигментами фитопланктона, желтым веществом, выделив главные факторы и корреляционные взаимоотношения.
Работа по оценке качества речных и озерных вод в широком диапазоне длин волн (320 ... 800 нм) позволила сделать вывод, что определение однозначных количественных связей между характеристиками исходящего светового ноля и фитопланктона требует учета многофакторности водной системы и Нестационарное™ происходящих процессов в водной толще того пли иного водоема.
Расчеты по учету влияния атмосферной дымки показывают, что, например, при λ0=450 нм и высоте полета 10 км полезный сигнал составляет 12% от измеряемого, отраженный - 34, а дымки - 54. В то же время для высоты 0,5 км - соответственно 20, 60, 20%. Учитывая результаты экспериментов, можно полагать оптимальной высотой аэроконтроля хлорофилла высоту 200 ... 700 м.
Малая расходимость и высокая спектральная яркость лазеров дают возможность реализовать интенсивное световое поле на значительных расстояниях от объекта контроля, а в совокупности с высокой чувствительностью приемников оптического диапазона позволяют использовать лазерные методы контроля хлорофилла в воде. Отраженный от водной среды оптический сигнал лазера после взаимодействия с ней содержит информацию о контролируемом параметре. Калибровка отраженного сигнала производится по спектру комбинационного рассеивания света молекулами воды.
В. В. Фадеев и др. в 1975 г. предложили экспресс-метод определения концентрации хлорофилла типа а в морском фитопланктоне. Суть его состоит в анализе спектра отраженного сигнала и сравнении площадей спектральных полос флюоресценции хлорофилла и комбинационного рассеяния света в водной среде. Отношение этих величин пропорционально отношению концентраций хлорофилла и молекул воды.
Экспериментальные апробации этого метода оказываются в хорошем соответствии с контрольными данными, подтверждают его перспективность и необходимость дальнейшего развития.
Фотолюминесценция морской воды впервые наблюдалась К. Раманатханом в 1923 г. В то же время известно немного работ, выполненных флюоресцентным методом в натурных условиях. Активные исследования в этом направлении за рубежом начаты в 1966 г. (С. Лоренцем), целенаправленное н систематическое изучение возможностей контроля фитопланктона у нас проводится, в частности, в институте океанологии АН СССР (Г. С. Карабашев, К. П. Зангалис, А. Н. Соловьев и др.).
На сегодня уже имеется набор данных спектр возбуждения - спектр флюоресценции, по которым можно судить о возможностях неконтактного контроля хлорофилла по его флюоресценции и, в частности, установлен факт, что вода как таковая собственной флюоресценцией не обладает.
На примере Балтийского моря (1969, 1970 гг.) показано, что спектр люминесценции практически не зависит от pII, концентрации кислорода и солености воды, а форма его изменяется с ростом длины волны возбуждения (365 ... 406 им) вследствие сложности качественного состава флюорогенов морской воды. Особенности пространственного распределения интенсивности объясняются на основе гипотезы Калле о происхождении флюорогенов морской воды и данных но контрольным гидрохимическим съемкам.
Исследования 1973 г. в тропической зоне Индийского океана для видимого диапазона возбуждения (430 ... 580 нм) и спектра флюоресценции в дальней красной зоне (более 690 нм) с помощью приспособления, исключающего влияние фотолюминесценции органических веществ, дали значительную положительную корреляционную связь большой и средней сил между интенсивностью люминесценции и концентрацией пигментов фитопланктона (хлорофилл типов а, в, с) для слоя 0 ... 50 м (ниже связь была слабой или отрицательной).
Г. С. Карабашев и А. Н. Соловьев подчеркивают, что существующим инструментальным методам индикации изменчивости содержания биогенной взвеси в море, основанным па оптических и акустических явлениях, свойственны трудности при оценке качественного состава фитопланктона. Проведенные натурные исследования вод Индийского и Тихого океанов говорят о том, что распределение импульсов сигналов люминесценции по амплитудам наиболее чувствительно к изменению качественного состава фитопланктона (периодичность и длительность импульсов возбуждения составили 0,5 и 10-6 с).
Для дистанционного неконтактного определения хлорофилла по его фотолюминесценции рекомендуется применять возбуждение при 460 нм, когда поглощение света хлорофиллом велико, фотолюминесценции водного гумуса почти нет и помехи от комбинационного рассеяния света самой водой (547 нм) легко отделимы светофильтрами.
В результате можно говорить о возможностях измерять дистанционно количественное содержание хлорофилла в поверхностном водном слое по величине интенсивности фотолюминесценции, определять количественное содержание хлорофилла и распределение хлорофиллосодержащих взвесей по размерам флюктуационной интенсивности флюоресценции. Кроме того, по изменениям форм спектра фотолюминесценции при соответствующих изменениях возбуждающей длины волны можно качественно характеризовать состав флюоресцирующего фитопланктона, по свечению в ультрафиолетовом свете определять соотношение физиологически наиболее активных, ослабленных и неактивных (мертвых) хлорофиллсодержащих клеток.
В 1968 г. были составлены первые космические карты распределения льдов в Арктике (аэрокартирование морских льдов начато в 30-е годы, хотя планомерное аэроизучеиие морских льдов организовано с 50-х г. с помощью телевизионных систем. Со временем появились инфракрасные, микроволновые и СВЧ-датчики. С 1966 г. ледовая авиаразведка дополнилась аэроизмерениями температуры безледнон водной поверхности с помощью ИК-радиометров.
Существует разнообразие способов ледового контроля с борта аэроносителей. Они нацелены на решение задач контроля толщины, рельефа нижней и верхней поверхности, плотности, электрических характеристик, температуры, солености льда.
Радиояркостное излучение льда носит колебательно-затухающий характер, кратный приближенно четверти длины волны во льду (рис. 4.8),
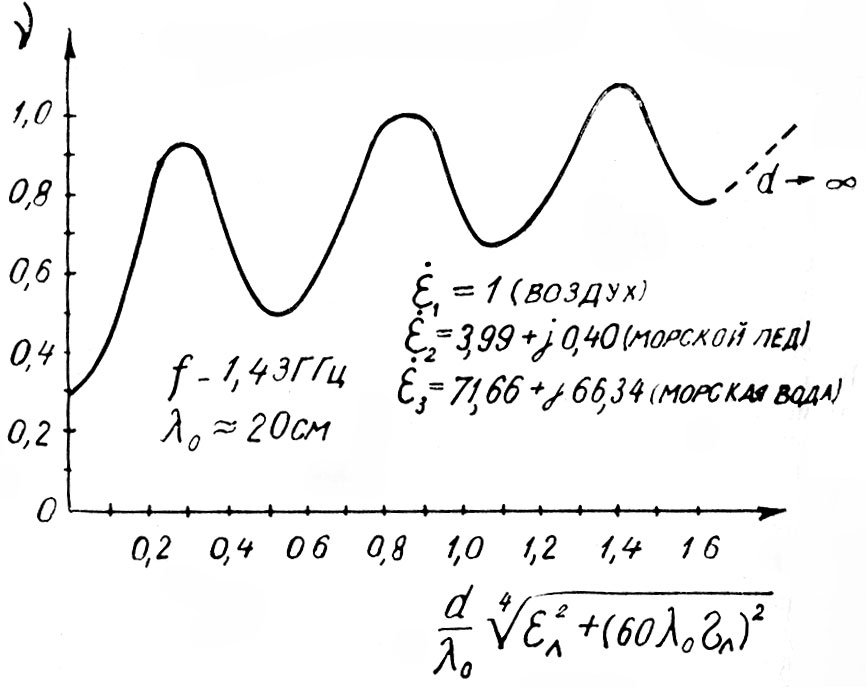
Рис. 4.8. Зависимость радиоизлучения морского льда от толщины льда
где ν - коэффициент излучения льда;
α - толщина льда;

- длина волны во льду.
Динамический диапазон измерений толщины льда уменьшается с увеличением частоты зондирующего сигнала (в основном за счет уменьшения коэффициента отражения от границы лед-вода с увеличением частоты), что поясняется на рис. 4.9.
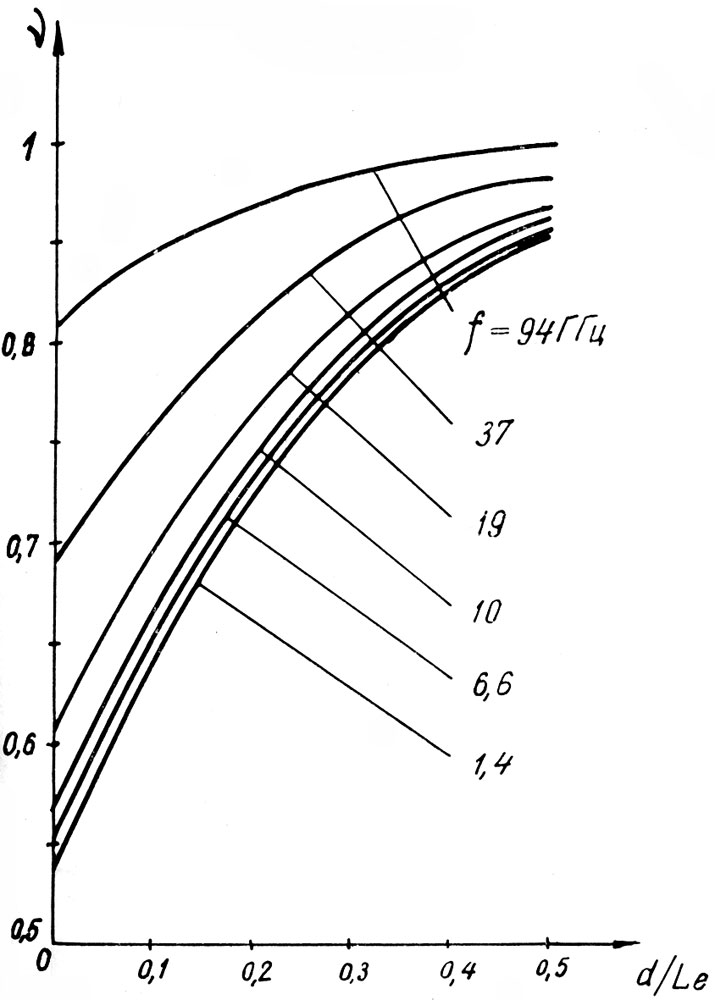
Рис. 4.9. Зависимость радиоизлучения морского льда от частоты излучения и толщины льда
Расчетные данные коэффициента отражения Ф для пресноводного и морского льда в зависимости от частоты зондирующего сигнала приведены на рис. 4.10 и 4.11.
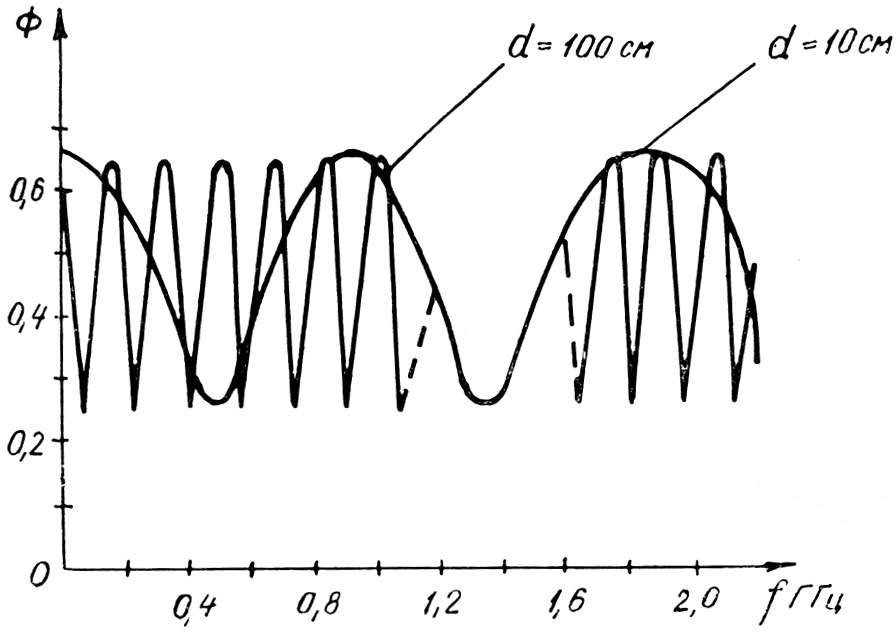
Рис. 4.10. Зависимость коэффициента отражения пресноводного льда
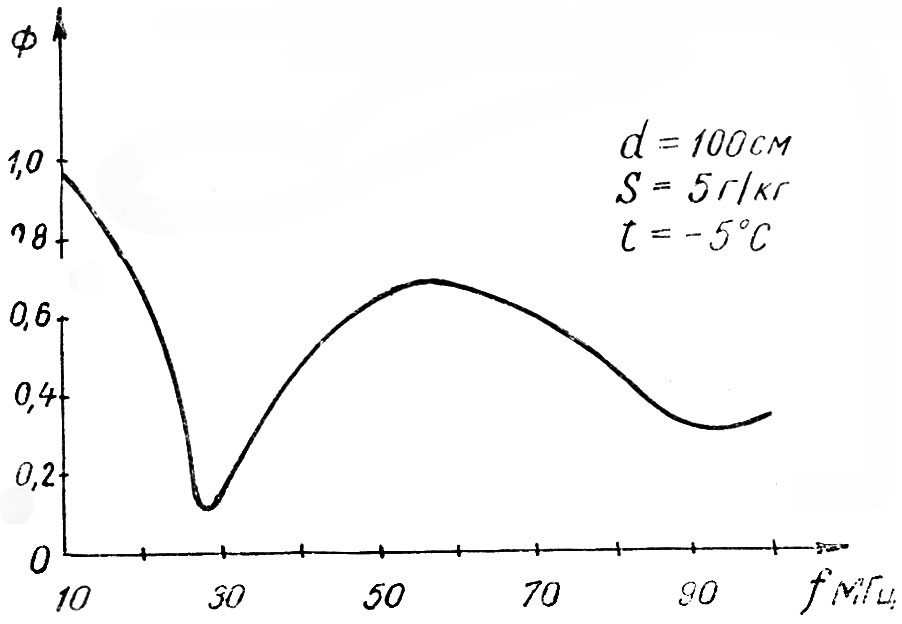
Рис. 4.11. Зависимость коэффициента отражения морского льда
Неконтактный контроль физиологических параметров человека
С середины XVI в. начался новый этап в познании живого. В. Гарвей приступил к исследованию кровеносной системы и сердца. Вероятно он первым прослушал пульсацию крови на запястье, сокращения сердца через междуреберье, при этом делая диагностические выводы. Пирогов Н. И. целенаправленно добивался точных данных о топографии человеческого тела (о форме и строении органов, послойной структуре частей тела). Раскрытие шкалой А. Лавуазье химической сущности процесса дыхания (конец 1700 г.) положило начало проникновению физики в биологию и медицину. После оптических открытий И. Ньютона (1666-1672 гг.) люди стали понимать ограниченность познания материального мира только органами своих чувств. А. Фуркуа приступил к изданию журнала "Медицина в свете физических наук", в котором впервые широко освещались биофизические вопросы и усиленно пропагандировался лозунг "Нельзя быть медиком, не будучи физиком".

Неконтактный контроль физиологических параметров человека
Органы чувств человека являются естественными биологическими датчиками наблюдения. Глаза представляют собой неконтактные электромагнитно-биологические индикаторы в диапазоне зондирующих волн 380 ... 760 нм. Академик Вавилов С. И. высказал мнение, что природа ограничила спектр видения из человеколюбивых побуждений: ультрафиолетовые лучи, вызывающие гибель живых клеток, ослепили бы нас, а инфракрасные лучи, испускаемые веками наших глаз, оказались бы сильнее всех лучей и заслонили бы собой окружающий мир. Наличие двух глаз, расположенных на расстоянии, обеспечивает объемность восприятия. Уши человека являются неконтактными акустобиологическими индикаторами (они также разнесены в пространстве, имеют ограниченный спектральный диапазон восприятия акустических сигналов). Тактильные рецепторы кожи возбуждаются при прикосновении к ним или давлении на них. Тепловые рецепторы кожи различают тепло и холод (в частности, рука человека чувствует изменения температуры в ГС).
Познание привело к созданию искусственных технических датчиков биофизического контроля. В 1701 г. был впервые описан жидкостный термоскоп, затем появились и другие медицинские измерительные приборы. Теория и практика электродинамики упругих колебаний способствовали дальнейшему повышению уровня физиологического контроля. Используя преимущества электросвязи, в 1906 г. впервые была дистанционно (по телефонному каналу связи) передана контактно снятая электрокардиограмма. В 1929 г. был создан первый неконтактный медицинский датчик термограф (определение температуры тела по интенсивности его инфракрасного излучения). В 1934 г. появились ультразвуковые диагностические приборы. В том же году, используя оптические свойства крови, был разработан фотометрический способ определения насыщения крови кислородом. В начале 50-х годов начались разработки радиолокационных устройств биофизического контроля.
В последние годы первостепенное значение приобретает задача контроля за состоянием целостного организма и, естественно, возникает необходимость разработки общей методологии системного проектирования радиоэлектронной физиологической аппаратуры. Ныне существует большое разнообразие методик проведения биологических анализов, контактных средств контроля состояния человеческого организма, комплексов тепловизионных, томографических исследований.
Тенденции развития средств биофизического контроля (комфортность, оперативность, высокопроизводительность, достоверность), особенно в связи с появлением космической медицины, систем человек-оператор, глобальным решением задач здоровья, свидетельствуют о целесообразности более активной разработки и серийного освоения неконтактных методов и систем контроля. При этом необходимо рациональное сопряжение неконтактных и традиционных контактных датчиков, разнообразных методологий контроля и диагноза. Учитывая, что в медицинской электронике изделие морально устаревает, в среднем за 4-5 лет, необходимо сопоставлять как научно-технический уровень разработок, так и сроки их практического внедрения.
Учитывая, что в человеческом теле имеется около 500 разновидностей тканей с различными электроакустическими свойствами, делаем вывод о целесообразности комплексирования неконтактного биофизического контроля как по принципам (активный, пассивный), так и по типам зондирующих полей (электромагнитные, акустические). В связи с этим встают задачи электромагнитной и акустической совместимости датчиков контроля, сопряжения полученных данных в единый диагностический медико-биологический банк.
Основные формы медицинской деятельности (профилактика, лечение, клиническое вмешательство, контроль состояния человека в процессе трудовой деятельности) требуют знания самых разнообразных показателей состояния человеческого организма как за короткий, так и за длительный промежуток времени. В рамках унитарных систем контроля возникает вопрос об оптимальном перечне контролируемых параметров, исходя из медико-биологических требований и технико-экономических возможностей реализации систем. Задаваясь необходимым перечнем, целесообразно оговорить тип полученных значений контролируемых параметров (абсолютные, относительные значения, частота изменения значений параметров, скорость или ускорение контролируемых процессов, статистические характеристики и др.).
Ввиду многофакторности взаимодействия зондирующих полей и биологической среды (отражение, преломление, затухание, дифракция, интерференция, дисперсия, деполяризация, люминесценция, доплеровский эффект и др.), теоретическое решение задачи косвенного определения биопарамстров по измеренным параметрам зондирующего поля не всегда осуществимо. Поэтому важная роль в неконтактном контроле должна принадлежать экспериментальным исследованиям, математическому и физическому моделированию, метрологической обеспеченности измерений.
В инфракрасном (ИК.) диапазоне воли используют несколько типов раднотепловых приемников:
- тепловые (термоэлементы, болометры, пироэлектрические и др.), у которых принимаемое излучение вызывает нагрев чувствительного элемента; они, в большинстве, частотно-неселективны. В термоэлементе изменение температуры приемной площадки вызывает появление ЭДС в двух спаянных проводниках из различных металлов. В болометре вызывается изменение электрического сопротивления проводника пли полупроводника. В диэлектрическом приемнике вызывается изменение диэлектрической проницаемости диэлектрика конденсатора, имеющей сильную температурную зависимость (в пироэлектрическом приемнике диэлектриком конденсатора служит сегнетоэлектрик, т. е. вещество, на поверхности которого появляется электрический заряд при механических деформациях; эти приемники имеют высокое быстродействие). В термиконе вызывается изменение фотоэмнесип. В оптико-акустическом приемнике изменение температуры одной стенки газовой камеры вызывает изменение температуры и объема газа и прогиб мембраны - второй стенки газовой камеры. Эвакография (регистрация сигнала по испарению) ведет свое начало с опытов Дж. Гершеля (сын В. Гершеля, открывшего перед этим инфракрасные лучи), которые оп провел в 1840 г.;
- фотонные (фоторезисторы, фотодиоды, фототранзисторы, фотоумножители, некоторые телетрубки, приборы с зарядовой связью и др.), основанные на явлении внешнего и внутреннего фотоэффекта при взаимодействии фотонов излучения с носителями зарядов в материале чувствительного элемента;
- люминесцентные (мегаскоп и др.), в которых происходит преобразование спектрального состава сигналов;
- фотохимические, основанные на всевозможных фотохимических превращениях в чувствительном элементе.
Датчики ИК-излучения: селективные и неселективные по частоте, охлаждаемые и неохлаждаемые, требующие внешнего питания и не требующие его; они отличаются инерционностью, чувствительностью, коэффициентом усиления.
Методы пассивного биоэлектрического, биомагнитного и акустического контроля основаны на приеме электростатических, магнитных и акустических полей человеческого организма, образующихся за счет биоэлектрической, биомагнитной активности живых тканей, ввиду механических колебаний заряженных частей тела, перемещений органов, тканей и клеточных структур.
Собственные электростатические поля образуются в процессе биоэлектрической деятельности живых тканей, органов и механических колебаний заряженных частей тела. Эти поля низкочастотны, регистрируются в индукционной и ближней зонах от поверхности тела. Их регистрация затруднена экранировкой высокопроводящимп биотканями, помехами электрических зарядов на теле, воздействием факторов окружающей среды.
Пассивный акустический контроль основан на регистрации акустических волн, создаваемых в процессе упругих перемещении органов и тканей (низкочастотные излучения), а также клеток (высокочастотные излучения). Трудности этого метода связаны с незначительным уровнем сигналов, выходящих из тела в воздух. Например, звуковое давление при переходе из воздуха в тело (кожу) уменьшается, в среднем, в 1 500 ... 2 000 раз, а при обратном переходе оно увеличивается всего в 2 раза. Однако акустическая прозрачность тела, а также сравнимость длины акустических (УЗ) воли и составляющих человеческого тела позволяет говорить о данном методе как о потенциально важном.
Собственное магнитное поле вызывается прежде всего ионными токами. Оно быстро ослабевает при удалении от их источника. Однако с появлением сквида, основанного па квантовых явлениях сверхпроводимости, появилась возможность создания сверхчувствительных магнитометров, предназначенных для измерения магнитных полей, магнитной восприимчивости, градиентов магнитных величин (чувствительность этих приборов более чем в 1 000 раз выше несверхпроводящих магнитометров).
Характерно, что хотя источник собственных магнитных и электрических полей бывает единый - биоэлектрическая активность человеческого организма, в то же время магнитограммы и электрограммы отличаются друг от друга и несут в себе взаимодополняющую информацию.
Учитывая, что акустическое сопротивление кожного покрова более чем в 1 000 раз превосходит акустическое сопротивление воздуха, а также сравнительную простоту технической реализации генерации волн малой длины, заключаем о практической возможности неконтактного активного ультразвукового контроля только параметров механических перемещений кожи за счет артериального, венозного и сердечного пульса, микропульсаций мышц. Активное акустическое зондирование основано на амплитудных, частотных, фазовых и временных соотношениях излученного и отраженного сигналов и осуществляется в одно- и двухпозиционном вариантах расположения излучателя и приемника. Необходимо отметить, что при реальных значениях амплитуды и частоты колебаний ннтенсивность акустического поля в воздухе составляет лишь 0,000 3 от интенсивности, например, в воде.
Первые практически пригодные активные звуколокационные устройства для работы в воздушной среде появились в послевоенный период и предназначались для ориентации слепых, профилирования стен, измерения уровней заполнения жидкостью. Однако в физиологическом контроле более важным является не дальность локации, а чувствительность, погрешность, помехоустойчивость. Специфика неконтактной активной акустолокации человеческого организма заключается в сравнительно малых paccтояниях контроля, влиянии температуры, газодыхания и перспирации кожи на параметры воздушной среды между датчиком и кожей, изменении рельефа, перемещений кожного покрова.
Так, например, с 1 м2 поверхности кожи человека выделяется углекислоты и поглощается кислорода по 100 см3 (при нормальной температуре воздуха и состоянии покоя). Эта величина сильно колеблется в зависимости от температуры воздуха: при 20-400, 30-230, 35°С-320 см3/ч с 1 м2 поверхности. Топограммы газодыхания кожи также различны: в области живота - 130, спины - 115, груди - 110, поясницы - 95, предплечья - 38, голени ноги - 28 см3/ч с 1 м2 (при нормальной температуре воздуха). Газодыхание кожи сильно зависит от температуры самой кожи, ее функционального состояния.
В связи с этим рассмотрим влияние температуры, влажности, газосостава и давления воздуха на скорость распространения и затухания акустических воли в воздухе.
Скорость распространения акустических волн в газе можно представить следующим образом:
где Р0 - статическое давление газа;
ρ - плотность газа;
αρ и αυ - удельные теплоемкости газа при постоянном давлении и постоянном объеме.
При постоянном P0 и повышении температуры Т газа (при t>0°С)
где βT - температурный коэффициент газа
Отсюда имеем отношение изменения скорости Δυ к изменению температуры ΔТ, равное
В частности, для сухого атмосферного воздуха (Р0=105 Па, ρ=1,293 кг/м3, при частоте f<100 МГц) имеем

где γT=1,83•10-3 1/К - температурный коэффициент воздуха; t - температура воздуха по шкале Цельсия, т. е. повышение температуры на один градус увеличивает скорость акустических волн примерно на 0,183% (в частности, в воде до + 75°С, эта величина равна 0,166%).
Для интервала давлении (0,9 ... 1,1)•105 Па (675 ... 925 мм рт. ст.) скорость акустических волн растет всего на 3•10-6 %,
Скорость звука в воздухе при увеличении на 0,03% в его объеме содержания, например, СO2 убывает на 0,06% (0,2 м/с).
При повышении влажности воздуха скорость волн вначале быстро увеличивается, затем после экстремума несколько уменьшается и далее опять растет. С повышением частоты акустических воли экстремум максимума смещается в сторону меньших значений влажности. При парциальном давлении Р водяных паров имеем

где υ0 - скорость волн в сухом воздухе; γW - влажностный коэффициент воздуха (при частотах колебании 50 ... 200 кГц он численно равен 2,2•10-4. Например, при 0°С увеличение относительной влажности от 60 до 98% приводит к росту скорости акустических волн на 1,5% (для частот 100 ... 200 кГц).
Поглощение энергии акустического поля в воздухе связано с переходом в другие виды энергии и прежде всего за счет потерь на трение и теплопроводность. Этот эффект наиболее проявляется для коротких звуковых и ультразвуковых волн. Затухание зависит от температуры, влажности, давления, газового состава. Учет наиболее существенных факторов поглощения в воздухе приводит к следующим данным расстояния затухания Le : 6 ... 2 м, при f=60 кГц; 1,5 ... 0,5 м, при f=200 кГц.
Метрология активных акустических датчиков в значительной степени определяется параметрами электроакустических преобразователей.
Необходимо учитывать, что Министерство связи СССР выделило для медицинской аппаратуры следующие частоты ультразвуковых колебаний: 22; 44; 66; 88; 110; 220; 440; 880; 1 760; 3 520 кГц. Санитарные нормы интенсивности непрерывного УЗ-воздействия на человека не превышают 30 мВт/см2.
Методы активного электромагнитного контроля основаны на анализе отраженных, прошедших или переизлученных зондирующих сигналов. Например, отраженная энергия может дать информацию о коэффициенте отражения объекта контроля, доплеровский спектр отраженного сигнала - о скорости движения, диаграмма направленности отраженного сигнала - о рельефе отражающей поверхности, люминесцентное излучение - о ряде биофизических свойств, форма прошедшего сигнала - о внутренней структуре объекта и т. п.
Отражение и поглощение человеческого тела в диапазоне нм- мкм- мм- см- метровых длин волн носит сложный характер с наличием экстремумов. Инфракрасные спектры наиболее просто связаны с молекулярной структурой биосреды, в отличие от ультрафиолетовых и видимых спектров, т. к. в первом случае осуществляются энергетические переходы атомов в молекулах, а во втором - электронные переходы в атомах молекул; СВЧ-волны более чувствительны к перемещениям тканей и органов, а видимые - к перемещениям, например, эритроцитов в крови.
Коже свойственен электронный эффект фотолюминесценции за счет энергетических переходов в молекулах с последующим послесвечением. Фотолюминесценция кожи определяется ее температурой, пигментацией, железами, кровенаполнением, патологическими изменениями.
Историческая справка
- в конце XIX в. русским терапевтом Захарьиным Г. А. и английским невропатологом У. Гедом были установлены и описаны определенные участки кожи человека, температурные изменения которых соответствовали болезням внутренних органов;
- в 1888 г. Тархановым И. Р. был зарегистрирован феномен возникновения и усиления биоэлектрических потенциалов кожи при воздействии на человека окружающей среды и процессов жизнедеятельности организма;
- в 1907 г. А. Кремер (бесконтактно) и в 1937 г. О. Мани (контактно) зарегистрировали изменение электрического сопротивления биотканей в процессе жизнедеятельности.
Учитывая вышеназванные взаимосвязи свойств кожи с организмом в целом и внешней окружающей средой, а также взаимообусловленность электрических и физиологических параметров, ясным становится важность контроля состояния кожного покрова.
Используя данные табл. 2.1 и проводя вариационные расчеты по значениям σ1, ε1 и λ0, получаем матрицу сравнительных показателей (Ф01/Le1), представленную в табл. 4.7.
| σ1, См/м | λ0 | ||||
|---|---|---|---|---|---|
| 7 м | 1 м | 40 см | 20 см | 3 см | |
| 0,01 | 0,81/5 м | 0,76/25 м | 0,75/2 м | 0,74/2 м | 0,73/2 м |
| 0,10 | 0,83/50 см | 0,75/40 см | 0,75/40 см | 0,74/30 см | 0,73/30 см |
| 1,0 | 0,93/10 см | 0,81/4 см | 0,79/4 см | 0,76 4 см | 0,73/3 см |
| 10,0 | 0,99/2 см | 0,95/7 мм | 0,90/7 мм | 0,86/4 мм | 0,74/3 мм |
| 100,0 | 0,99/8 мм | 098/3 мм | 0,97/2 мм | 0,96/2 мм | 0,89/0,5 мм |
| ε=97 | 54 | 52 | 49 | 40 | |
Анализ данных матрицы показывает, что при:
λ0>1 м значения Ф01 резко растут, если 10>σ>0,1 См/м;
λ0<0,1 м значения Ф01 меняются незначительно если σ1<10 См/м
1 м>λ0>0,1 м значения Ф01 изменяются существенно, если 100>σ1>0,l См/м;
значения ε1 и σ1 меняются незначительно (дисперсия мала), значения Le1 соответствуют, примерно, толщинам кожи (при σ1>1 См/м).
В итоге приходим к выводу об оптимальных диапазонах:
- для контроля электрофизиологических свойств кожи 1 м>λ0>0,1 м при значениях 100>σ1>0,1 См/м (ε1≈50);
- для доплеровского контроля пульсаций кожи λ0<0,1 м при значениях σ1<10 См/м (ε1≈40).
Отметим, что Международным союзом по радиосвязи в пределах СВЧ-диапазона (500 МГц... 40ГГц) выделены следующие частоты для медицинского оборудования: 915 МГц (λ0≈33 см); 2,45 ГГц (λ0≈12 см); 3,3 ГГц (λ≈9 см); 5,8 ГГц (λ≈5 см); 10,525 ГГц (λ0≈3 см).
Преимущества люминесцентного контроля заключаются в его высокой чувствительности, повышенной селективности, ввиду использования двух длин волн (возбуждения и переизлучения), в частичном устранении многофакторности воздействия объекта контроля на зондирующий сигнал за счет отсутствия люминесценции у некоторых компонентов объекта контроля (хотя нелюминесцентное поглощение этими компонентами происходит). К недостаткам фотолюминесцентного метода можно отнести относительно слабый уровень переизлученного сигнала люминесценции, помехи за счет отраженного сигнала, резонансного поглощения, рэлеевского и комбинационного рассеяний.
Использование фотолюминесцентногр метода контроля в биологии и медицине имеет свою историю. Еще в 1903 г. изучалась флюоресценция кожи, волос, зубов, в 20-30-е годы люминесценция использовалась для исследования патологических процессов в наружных областях тела. В 1924 г. установлено, что кожа обладает способностью флюоресцировать синеватым цветом, оттенки которого у разных людей неодинаковы. Интенсивность и цвет флюоресценции кожи зависит от ее пигментации, кровенаполнения, состояния рецепторов, желез и др.
Учитывая как важность знания упругих свойств внутренних органов и тканей, так и диагностические возможности ультразвуковых волн, электромагнитно-акустический метод неконтактного подповерхностного неконтактного контроля приобретает важную роль. Метод основан на переходе в кожном покрове энергии лазерного излучения в ультразвуковые зондирующие волны, которые затем неконтактно регистрируются при выходе из тела.
Необходимо учитывать, что эффективность подобного преобразования энергии электромагнитного поля в энергию акустических колебаний сравнительно мала (по отношению к традиционным электроакустическим преобразователям), а также то, что акустическое давление при переходе из тела в воздух увеличивается всего в 1,5 ... 2,0 раза.
При относительно небольших (в пределах санитарных норм) плотностях энергии облучающего электромагнитного поля W основным фактором неконтактной генерации акустического сигнала является, очевидно, тепловое объемное расширение кожного покрова, т. к. исходя из аналитического выражения для давления падающего электромагнитного поля видна несоизмеримость значений величин W и скорости света. Эффект теплового объемного расширения кожного покрова рассматривается без изменения агрегатного состояния кожи, когда поглощательные свойства кожи (как и все ее теплофизические параметры) изменяются незначительно, соразмерно изменениям температуры и давления в объеме возбуждения акустических волн. Характерно, что в отличие от электронного возбуждения, которое сохраняется в течение около 10-9 с (что, например, достаточно для фотохимических реакций с заметным квантовым выходом), колебательное движение возбужденной структуры кожи релаксирует в тепло за значительно более короткое время (около 10-11 с) и тепло не успевает за время импульсного (модулированного) облучения распространиться за пределы облучаемого объема. Ввиду малой инерционности возникновения локальных тепловых напряжений в конденсированных средах можно считать, что плотность мощности тепловых источников акустических волн изменяется во времени так же, как интенсивность электромагнитного облучения.
Численную оценку эффективности Э подобного электромагнитно-акустического преобразования в кожном покрове можно оценить из аналитического выражения

где Руз - полная мощность образованного акустического сигнала, Вт;
Рэм - полная мощность облучающего электромагнитного сигнала, Вт;
Iэм - интенсивность электромагнитного облучения, Вт/м2;
υ - скорость распространения акустических волн в коже, м/с;
ρ - плотность вещества кожи, кг/м3;
А - коэффициент пропускания кожей электромагнитного облучения;
γ- коэффициент затухания электромагнитного облучения в коже, 1/м;
α - коэффициент теплового объемного расширения кожи, 1/К;
Ср - удельная теплоемкость кожи при постоянном давлении, Дж/кг•К;
k0=2π/λ0 - волновое число электромагнитного сигнала, 1/м;
m - индекс модуляции интенсивности электромагнитного облучающего сигнала.
При численных оценках величины Э необходимо учитывать, что интенсивность облучающего кожу электромагнитного сигнала должна быть не более 50 мВт/см2, а интенсивность образованного акустического сигнала - менее 30 мВт/см2, а также ряд других ограничений.
Методами регистрации вышедшего из тела акустического сигнала могли бы стать модуляционный метод измерения, поляризационная селекция и другие, используемые в радиофизике, радиолокации, радиоастрономии для выделения слабых сигналов на фоне маскирующих помех.
Рефлексный метод неконтактного контроля
Рефлексный метод является разновидностью активного принципа контроля. Активные рефлексные датчики на сравнительно небольших расстояниях контроля сочетают в себе преимущества активного и пассивного контроля - имеют один основной блок, сочетающий в себе одновременно функции передачи и приема зондирующего сигнала, имеют широкий набор информативных показателей зондирующего сигнала. Рефлексный метод справедлив как для электромагнитных, так и для акустических волн. Сами датчики представляют собой излучающее устройство (автогенератор, автогенератор с усилителем, генератор с модулятором, нагруженные на антенну) с запаздывающей внешней обратной связью по отраженному от объекта контроля сигналу.
Рефлексный метод неконтактного контроля
Взаимодействие объект контроля - антенна происходит в воздушной среде посредством зондирующих волн (процесс рассматривается на базе теории электромагнитного и акустического полей п теории антенн), а взаимодействие антенна - генератор, модулятор или усилитель - посредством электрических сигналов (процесс рассматривается на основе теории радиотехнических цепей и сигналов, теории приема и пере дачи информации).
Решение задачи рефлексного контроля базируется на математическом и физическом моделировании.
Одним из существенных отличий рефлексного метода от традиционного активного принципа локации является введение процесса усиления реакции излучающего устройства на собственный отраженный от объекта контроля сигнал. Рост чувствительности электрических цепей датчика на появление и изменения отраженного Сигнала производится за счет выбора соответствующего режима работы традиционных активных элементов (или создания новых активных элементов), введения специальных элементов и цепей в избирательно-колебательную часть датчика, выбора пли построения специальных антенн, задания соответствующих параметров зондирующего сигнала.
Избирательность рефлексных датчиков к контролируемым параметрам объекта будет определяться частотой излучения, чувствительность - показателями электрической схемы датчика, помехоустойчивость - модуляционными параметрами сигнала, поляризацией излучения, направленными и частотно-поляризационными свойствами антенны.
Процедуру электрических процессов в электромагнитном рефлексном датчике можно описать следующим образом. Генератор (непосредственно пли через усилитель) развивает в антенне ЭДС, которая приводит к ускоренному движению (по заданному закону) электрических зарядов, создающих в воздушном пространстве электромагнитную волну. Отраженный сигнал наводит в антенне дополнительную ЭДС. Результат взаимодействия в антенне этиx двух колебаний зависит от параметров самой антенны, отражающих свойств объекта, расстояния до объекта, скорости и направления взаимного движения датчика и объекта, поляризации излученного и отраженного сигналов. Это взаимодействие приведет к изменению электрических параметров антенны, что скажется на режиме работы генератора в целом (изменятся Параметры избирательно-колебательной части, режим работы активного элемента), а это приведет в свою очередь к изменению параметров вновь излучаемого сигнала. Лавинообразного процесса последующих изменений не произойдет, т. к. вторичный отваженный сигнал создает изменения меньшего порядка малости; изменения произойдут только при последующих существенных изменениях вышеназванных условий отражения.
Таким образом, при рассмотрении рефлексного метода мы отходим от условий однонаправленности и независимости [Rвx≠∞ Rвx≠0, где R - сопротивление по входу и выходу составных частей датчика) приемопередачи сигналов традиционными методами, прилагая при этом меры к управляемому изменению степени нарушения этих условий.
Использование усилителя или модулятора, а не генератора в качестве зависимого от отраженного сигнала источника зондирующих колебаний может быть вызвано необходимостью увеличения мощности излучения (например в бортовых системах контроля при значительных высотах полета), оптимизацией процесса нелинейных искажений в генераторе с увеличением глубины положительной обратной связи и процесса ослабления усиления с увеличением глубины отрицательной обратной связи, рациональным решением вопросов модуляции исходного гармонического зондирующего сигнала, ослаблением требований к задающему генератору.
Учитывая главные факторы формирования отраженного сигнала (электрофизические параметры объекта, расстояние до объекта, скорость и направление движения датчика или объекта, геометрия отражающей поверхности), требуется решать вопросы избирательности по перечню контролируемых показателей объекта контроля.
Рассмотрим в частотно-временной области некоторые закономерности рефлексного метода на примере автогенератора с запаздывающей обратной связью по отраженному сигналу. Излучая "изменяющийся во времени сигнал e0(t), полагаем расстояние до объекта равным h=h0±υt,
где h0 - начальное расстояние; знак - означает сближение, а знак + говорит об удалении объекта от датчика; υ=υ0cosα - скорость относительного сближения или удаления, υ0 - скорость при угле рассогласования направлений движения α, равном нулю. Время задержки отраженного сигнала будет равно

Временную зависимость коэффициента отражения можно представить как Ф(t)=Ф(t-τ3/2). Тогда отраженный сигнал, воздействующий па антенну, можно представить во времени следующим образом:

Отметим, что коэффициент отражения (его модуль и фаза) является функцией от многих переменных: электрических параметров объекта контроля, скорости υ, геометрии поверхности объекта контроля, неоднородности параметров объекта и др. Причем степень влияния этих факторов может быть различной - примерно равной, преимущественной за счет одного или нескольких факторов.
Последнее аналитическое выражение определяет временные зависимости, но не характеризует волновой характер распространения электромагнитной волны. Если возбуждение антенны производится гармоническим изменением ЭДС по закону ехр (jω0t), то фазовый множитель имеет вид exp [j(ω0t-φ0)]=ехр[j(ω0t-kh)]. Тогда мгновенное значение излучаемого сигнала имеет вид

где Е0 - амплитудное значение напряженности электрического поля;
ω0 - частота излучаемого сигнала.
Мгновенное значение напряженности электрического поля в соответствии с правилами символической записи величин при гармонических процессах определяется действительной частью предыдущей формулы:

По аналогии получим частотно-временное выражение для отраженного сигнала, учитывая, что Ф=Ф ехр (jφФ):

Здесь необходимо отметить возможность изменения частоты отраженного сигнала при υ≠0

за счет деплеревского эффекта, а также изменение частоты и при υ=0 в случае образования сигнала фотолюминесценции. В первом случае (υ≠0) флюктуации угла α приведут к погрешности

Рассмотрим теперь автогенератор на полевом или биполярном транзисторе с последовательным колебательным контуром й трансформаторной обратной связью М. Нагрузкой автогенератора является антенна, которую можно представить комплексным сопротивлением ZAвх.
Напряжение на последовательном колебательном контуре равно сумме падений напряжения на индуктивности UL, на емкости UC и на активном сопротивлении UR:
UK=UL+UC+UR
Учитывая крутизну характеристики прямой передачи транзистора S=S(Uвх), где Uвх≈Uoc, имеем

Продифференцировав п сгруппировав составные части этого уравнения, получаем однородное нелинейное дифференциальное уравнение второго порядка:

Комплексное сопротивление ZAвх можно учесть, преобразуя контур в эквивалентный контур.
Заменяя в контуре, например, линейную емкость на нелинейную, учтем зависимость

откуда видно, что после изменении напряжений и токов в контуре, вызванных изменениями ZAвх, значение величины dC(UC)/dt обратится в ноль; значение С(UС) приобретает (в процессе переходного процесса) другое значение (например, за счет изменения запирающего напряжения на варикапe) и будет иметь постоянное значение в стационарном режиме до следующего определенного изменения ZАвх.
Время между исследующими изменениями входного сопротивления антенны должно быть больше, чем время переходного процесса в нелинейном контуре. Чувствительность подобных датчиков к изменениям отраженного сигнала будет в немалой степени определяться крутизной характеристики C(UС).
Рефлексные датчики с нелинейным контуром можно представить дискретно-нелинейным уравнением Дуффинга или, соответственно, нелинейно-дискретным уравнением Льенара
где у - искомая функция;
α - линейный коэффициент;
f1(y) и f2(y) - нелинейные коэффициенты.
Используя возможности численных методов решения подобных уравнений на базе средств цифровой вычислительной техники, можно исследовать оптимизационные вопросы построения рефлексных датчиков конкретного практическою использования. Рассмотрим далее вопрос влияния отраженного сигнала па показатели излучающей антенны.
Поле приповерхностного вертикального вибратора впервые обстоятельно рассмотрел А. Зоммерфсльд (1909 и 1926 гг.), а Г. Гершельман (1911 г.) рассмотрел свойства горизонтального вибратора под влиянием земной поверхности, Л. Р. Вольперт (1946 г.) изучил поведение приповерхностных вибраторов па основе отражательного подхода. Касаясь такого важного параметра как входное сопротивление, Б. 13. Баруде в 1940 г. указал, что для приповерхностных антенн пользоваться этим понятием в том смысле, в каком это принято (для идеально проводящей отражающей поверхности), было бы ошибочным.
В разведочной геофизике А. А. Петровским в 1924-1926 гг. впервые было рассмотрено влияние земной поверхности (почв, ледников, мерзлых пород в случае однородных и слоисто-неоднородных сред) па показатели излучающей антенны. Дальнейшие исследования А. А. Петровского, А. Н. Тихонова, Д. Н. Четаева (1956 г.), А. А. Семенова и Г. А. Карпеева (1958 г.), Г. Я. Черняк и О. М. Мясковского (1973 г.); Л. Г. Павельева и В. А. Бадера (1981 г.) и ряда зарубежных ученых привели к уточнению вопросов измерения активной и реактивной составляющих входного сопротивления, токораспрёделения, диаграммы направленности приповерхностных антенн.
Сложность теоретической оценки входного сопротивления антенны с учетом влияния подстилающей среды привела на первых порах к приближенным экспериментальным оценкам (например, эмпирическая формула Шулейкина для сопротивления потерь в земле, формула Рюденберга для сопротивления излучения и др.). В 1942 г. А. Зоммерфельдом и Р. Реннером был решен вопрос о вычислении сопротивлении горизонтального и вертикального диполей Герца, размещенных над полупроводящей поверхностью, что являет собой критерии точности подобных вычислений.
В последние годы метод измерения импеданса антенн уже используется для изучения грунта планет с борта космических аппаратов.
Используя математический аппарат метода наведенных ЭДС, Г. А. Лавров п А. С. Князев получили для линейных антенн аналитические выражения, несколько упрощающие количественные расчеты изменений вертикальных и горизонтальных вибраторов под влиянием реальных подстилающих сред.
Метод наведения ЭДС обладает рядом вычислительных преимуществ и большей наглядностью процесса влияния отражающей поверхности па электрические показатели излучающей антенны. Входное сопротивление определяется исходя из наличия падающего и отраженного полей между антенной и объектом контроля п представляется в виде двух слагаемых - для случая идеально проводящей и поправки для реальной (полупроведящей) отражающей поверхности:
ZAвх=ZAвх∞+ΔZAвх.
Для рефлексного метода контроля более рациональным было бы представление ZAвх в виде других слагаемых - для случая свободного пространства и поправки при наличии отраженного сигнала от полупроводящей поверхности:
ZAвх=ZA0вх+ΔZAвх.
Условия применимости метода наведенных ЭДС для расчета антенны, размещенной над поверхностью с относительной диэлектрической проницаемостью е и удельной проводимостью а, выражаются в следующем виде:
где
Наибольшая изменчивость отражательных свойств (для вертикального зондирования) реальных объектов контроля наблюдается при λ0>1 м, когда ε=4 ... 10, σ=0,001 ... 0,01 (сухие почвы) и ε=15-20, σ=0,02-0,06 (влажные почвы);
при 1,0 м>λ0>0,1 м, когда ε=50 ... 100, σ=0,01 ... 100,0 См/м (для кожного покрова);
при λ>1 м, когда ε≈80, σ=0,1 ... 4,0 См/м (пресные и соленые воды). Проверим выполнение вышеназванных условий.
Второе условие при указанных значениях λ0 и даже при минимальных значениях ε и σ достаточно выполняется, Первое условие выполняется (при указанных λ0, ε, σ) для высот расположения антенны над контролируемой почвой:
h>hмин≈0,01 м.
Величина ΔZAвх, полученная методом наведенных ЭДС, представляется в виде двух сомножителей. Один сомножитель зависит только от значений l/λ0 и h/λ0, а другой - от значений величин ε, σ при заданной λ0:

Некоторые значения функции Z (l/λ0; h/λ0) для четвертьволновых (вертикального и горизонтального) симметричных вибраторов приведены в табл. 4.8, а для полуволновых - в табл. 4.9.
| h/λ0 | Zв=c+jd | Zг=a+jb |
|---|---|---|
| 0,01 | -1,77+0,83 | -11,61-0,02 |
| 0,02 | -1,17+0,81 | -5,45+0,81 |
| 0,03 | -0,83+0,76 | -3,44+0,20 |
| 0,05 | -0,43+0,69 | -1,88+0,35 |
| 0,10 | +0,04+0,48 | -0,55+0,37 |
| 0,15 | +0,21+0,22 | -0,23+0,40 |
| 0,20 | +0,20-0,07 | -0,08+0,40 |
| 0,25 | -0,28-0,22 | +0,07+0,27 |
| 0,30 | -0,16-0,20 | +0,20+0,17 |
| 0,40 | -0,09-0,09 | +0,17-0,10 |
| 0,50 | -0,01-0,02 | -0,02-0,16 |
| 0,75 | -0,08-0,02 | -0,17-0,20 |
| 1,00 | -0,08+0,01 | -0,39-0,33 |
| h/λ0 | Zв=c+jd | Zг=a+jb |
|---|---|---|
| 0,01 | -0,72+0,63 | -25,00-0,34 |
| 0,02 | -0,57+0,52 | -12,60+0,31 |
| 0,03 | -0,30+0,67 | -7,10+0,63 |
| 0,05 | -0,12+0,41 | -5,20+0,74 |
| 0,07 | 0,00+0,33 | -4,20+0,88 |
| 0,08 | +0,05+0,26 | -3,10+0,97 |
| 0,10 | +0,10+0,10 | -2,47+1,31 |
| 0,20 | +0,10+0,00 | -0,19+1,50 |
| 0,25 | +0,03-0,06 | +0,02+0,76 |
| 0,30 | +0,06-0,10 | +0,86+0,55 |
| 0,40 | -0,01-0,07 | +0,64+0,43 |
| 0,50 | 0,00-0,01 | -0,15-0,64 |
| 0,60 | -0,10-0,00 | -0,50-0,08 |
| 0,80 | -0,22+0,12 | -0,29-0,30 |
| 1,00 | -0,43+0,42 | -0,05-0,32 |
В свободном пространстве четвертьволновый вибратор имеет ZА0вх=24,7+j27,8 Ом, а полуволновый вибраторе имеет ZА0вх=73,1 +j42,5 Ом. Для вертикального четвертьволнового вибратора ZAвх∞=36,55+j21,25, а для полуволнового ZAвх∞=84,95+j35,95 Ом.
Учитывая существенную разницу приведенных табличных данных, сосредоточим внимание на исследовании свойств горизонтальных вибраторов:
В результате получаем следующее аналитическое выражение отдельно для активной и реактивной частей входного сопротивления вибраторной горизонтальной антенны, находящейся над полупроводящей поверхностью:
Приведем количественные оценки изменений входного сопротивления линейных вибраторных антенн для различных объектов контроля.
Например, для четвертьволнового симметричного вибратора при λ0=10 м(2l=2,5 м) и размещении его над водной поверхностью (соленость изменяется в диапазоне, примерно от 1 до 40 г/кг) значения RAвх и ХАвх при высоте h=0,5 м (h/λ0=0,05; а+jb=-1,880+j0,348) и при высоте h=5 м (h/λ0=0,5; а+jb=-0,023-j0,160) рассчитаны и приведены в табл. 4.10, а при λ0=5 м - в табл. 4.11.
| ε=80σ,См/м | λ0=10 м, h=0,5 м, 2l=2,5 м | λ0=10 м, h=5 м, 2l=2,5 м | ||
|---|---|---|---|---|
| RАвх, Ом | ХАвх, Ом | RАвх, Ом | ХАвх, Ом | |
| 0,1 | 25,4 | 18,7 | 36,4 | 20,3 |
| 1,0 | 32,8 | 18,5 | 36,3 | 21,0 |
| 2,0 | 34,0 | 19,2 | 36,4 | 21,0 |
| 3,0 | 34,0 | 19,6 | 36,4 | 21,1 |
| 4,0 | 34,4 | 19,8 | 36,4 | 21,1 |
| 5,0 | 35,0 | 20,0 | 36,5 | 21,1 |
| ε=80σ,См/м | λ0=5 м, h=0,25 м, 2l=1,25 м | λ0=5 м, h=2,5 м, 2l=1,25 м | ||
|---|---|---|---|---|
| RАвх, Ом | ХАвх, Ом | RАвх, Ом | ХАвх, Ом | |
| 0,1 | 24,2 | 15,8 | 36,5 | 20,2 |
| 1,0 | 34,4 | 15,1 | 36,3 | 21,0 |
| 2,0 | 32,8 | 18,5 | 36,3 | 21,0 |
| 3,0 | 33,5 | 19,0 | 36,4 | 21,1 |
| 4,0 | 34,0 | 19,2 | 36,4 | 21,1 |
| 5,0 | 34,2 | 19,4 | 36,4 | 21,1 |